Deze pagina nog niet eerder bekeken en nieuwsgierig naar het verloop? Begin dan onderaan met lezen!
Wil je reageren of een vraag stellen? Dat kan onderaan de pagina (maak een gratis account aan op de site). Klik hier om direct naar de reacties te gaan.
Datum: 11-10-2023
Na de proefexemplaren (versie 2.2) zijn er toch nog wat kleine verbeteringen verwerkt en is de uiteindelijke versie 2.5 gereed en getest. Het is een module geworden die naast een Loconet interface ook een Loconet monitor functie kan vervullen.
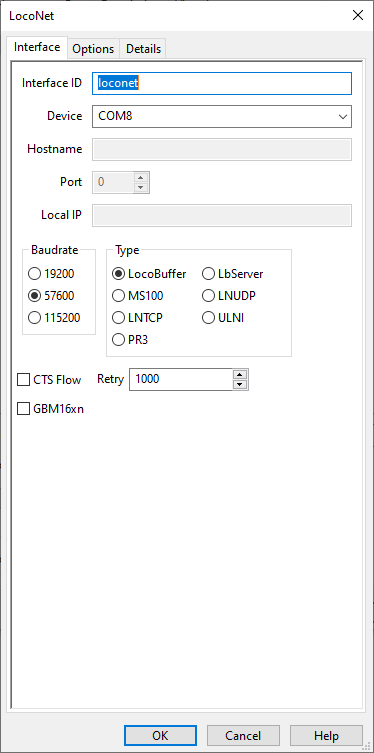
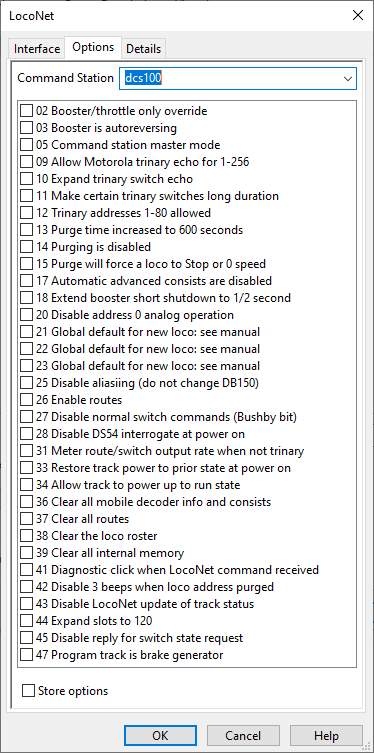
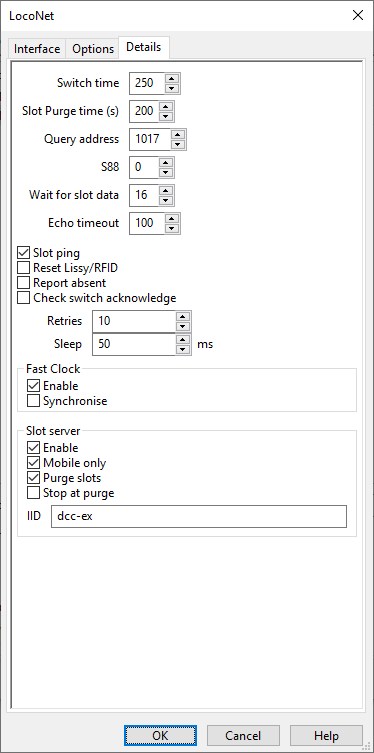
De interface wordt gebruikt om de computer uit te breiden met een Loconet interface zodat bijvoorbeeld in Rocrail naast het primaire command station (zonder Loconet) een secundaire controller kan worden toegevoegd. De instellingen om een extra controller toe te voegen in Rocrail properties, tabblad controller, zijn hieronder weergegeven:
Datum: 11-08-2023
En alweer was het een tijdje stil maar stil hebben we niet gezeten! We hadden vanwege wat uitdagingen op de testbaan eerder besloten om voor de aansturing van de servo’s, relais en seinen eveneens gebruik te gaan maken van de toch al aanwezige Loconet bus. Die bus moet er namelijk sowieso komen voor de bezetmelders.
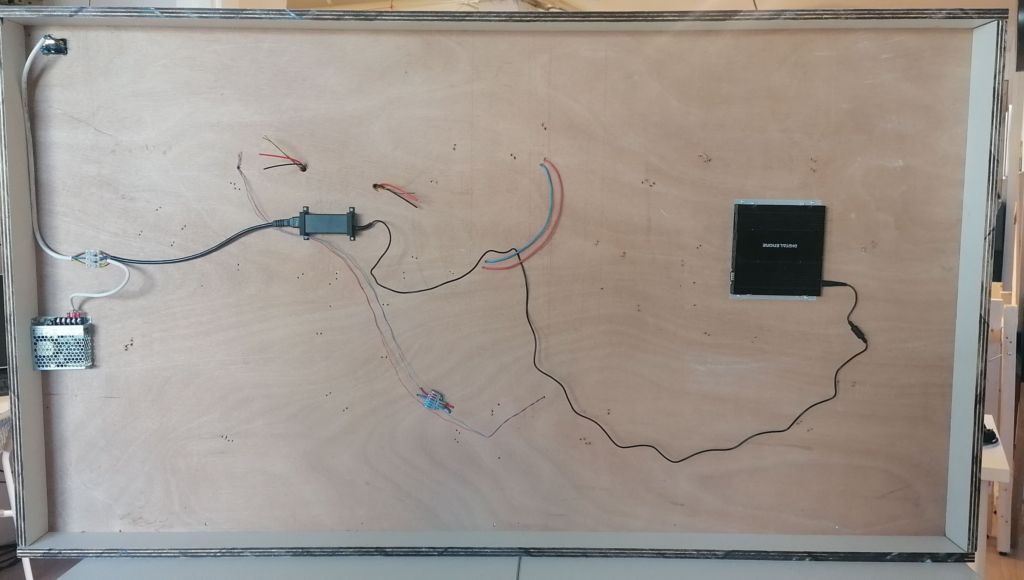
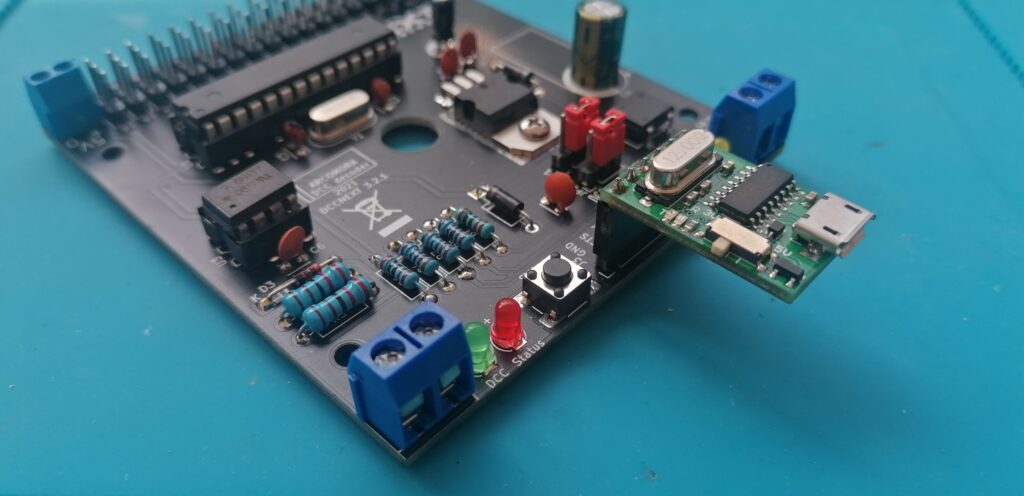
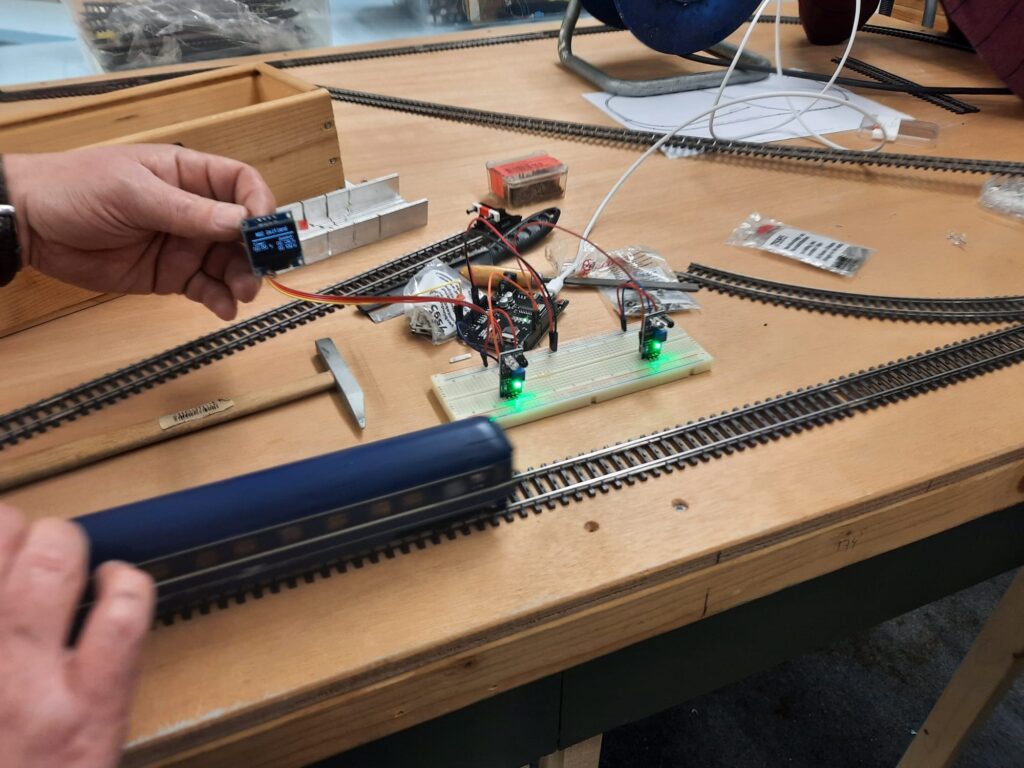
Omdat ook veel commerciële Loconet modules bij elkaar een behoorlijke investering met zich meebrengen, is gezocht naar alternatieven. Er is een simpel schema te vinden om Loconet aan een Arduino te koppelen. Omdat niet iedere centrale is voorzien van een Loconet aansluiting en je in de software (Rocrail of iTrain) een tweede centrale kan toevoegen, is een Loconet naar USB interface het eerste wat opgebouwd en getest diende te worden. Tijdens de vakantie in Frankrijk werd dit schema dan ook in de tijdelijke werkplaats in de voortent van de caravan opgebouwd op een breadboard.

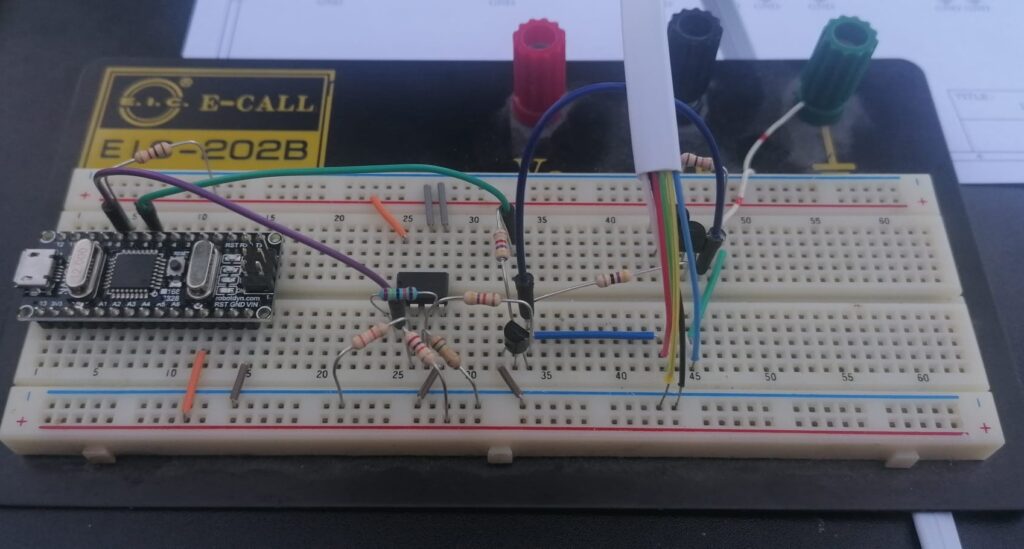
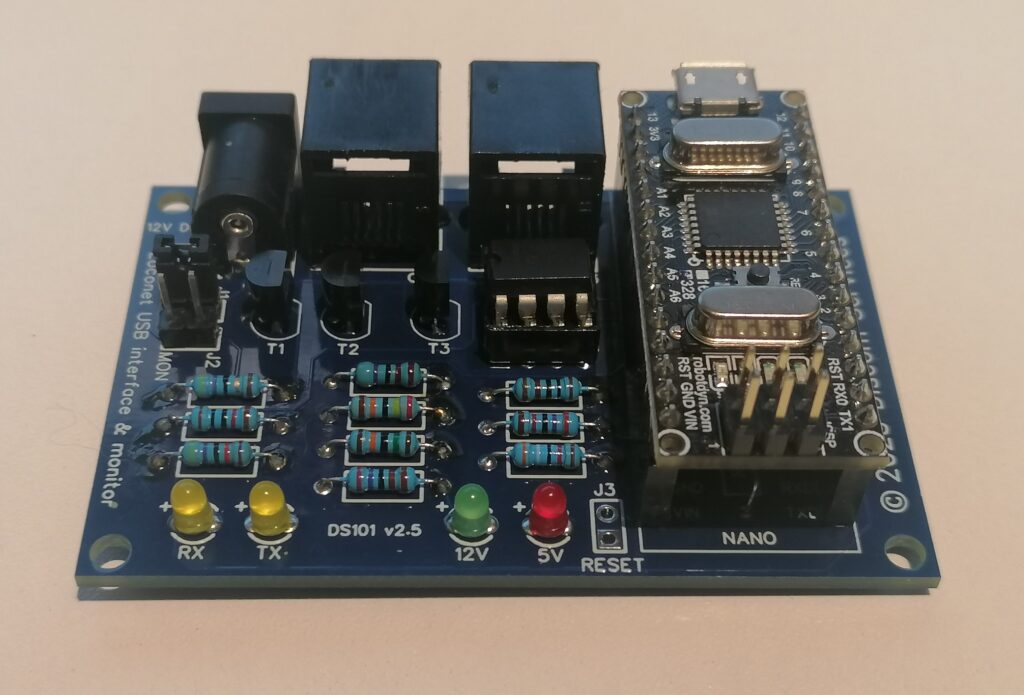
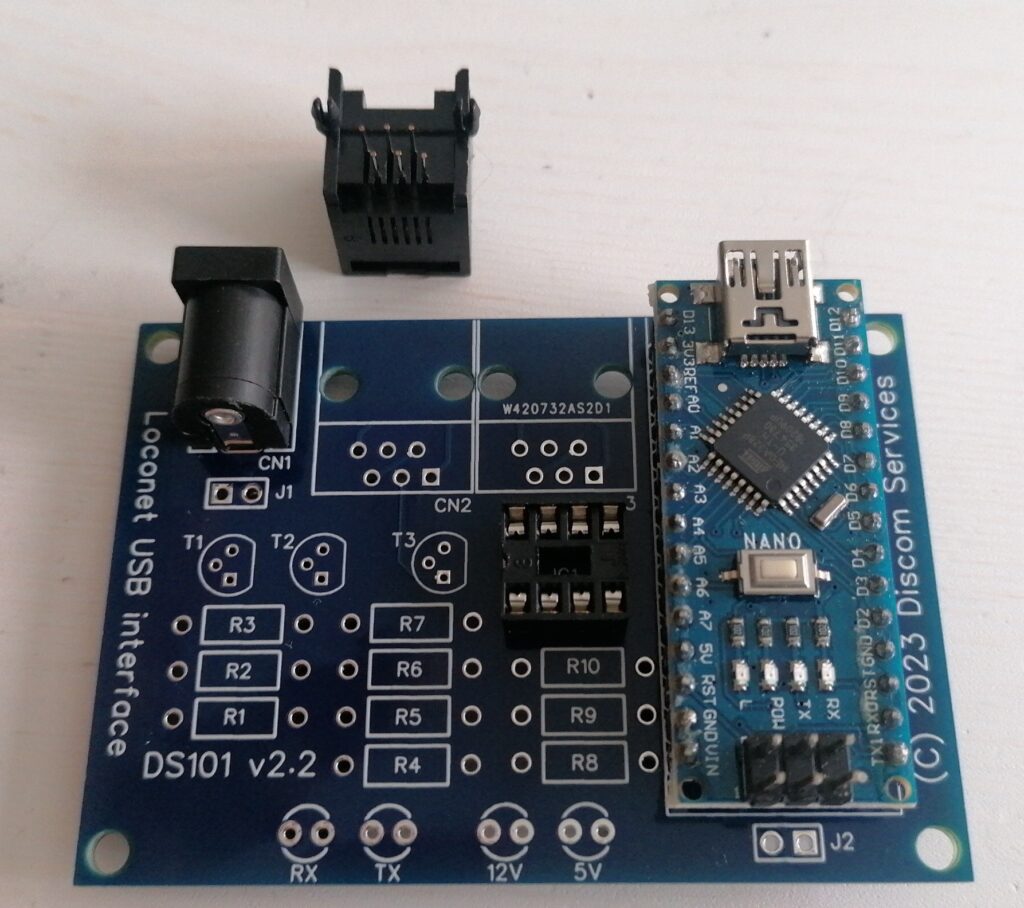
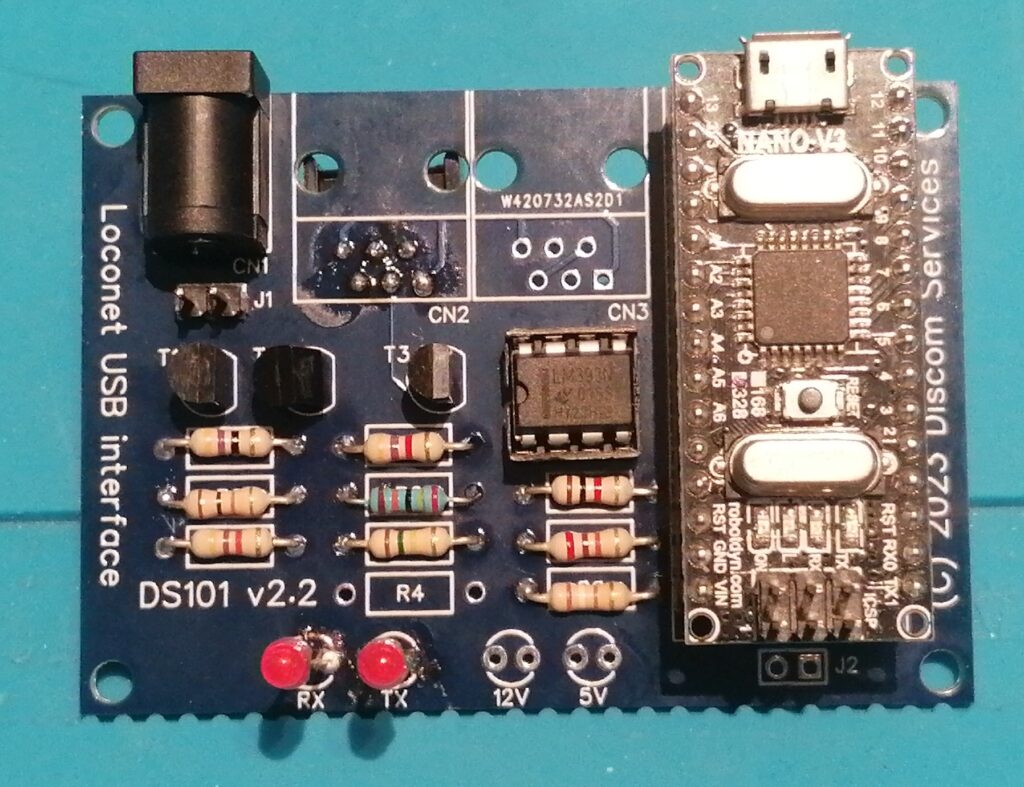
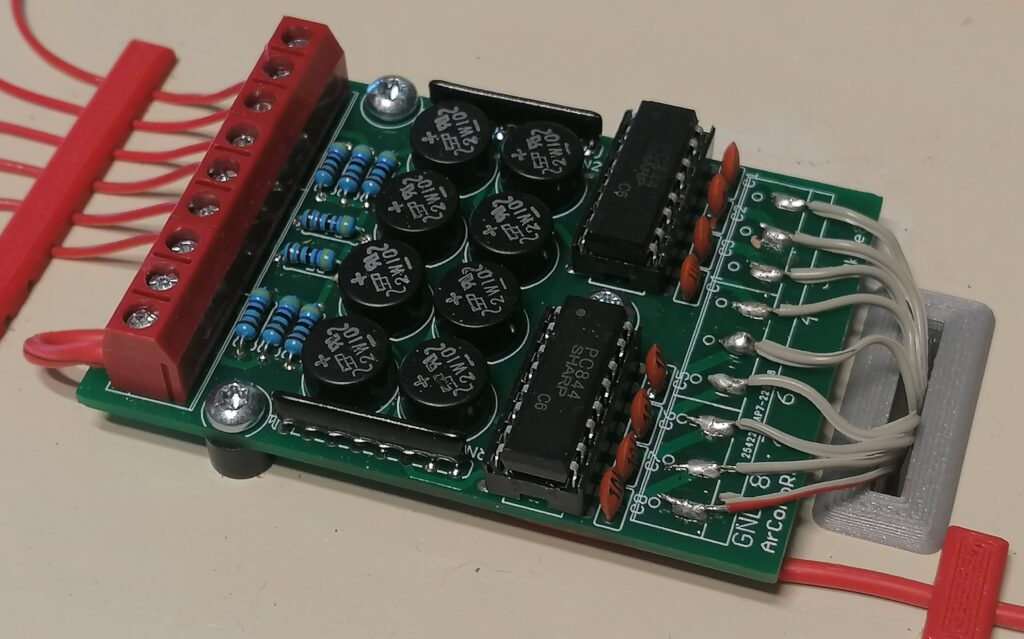
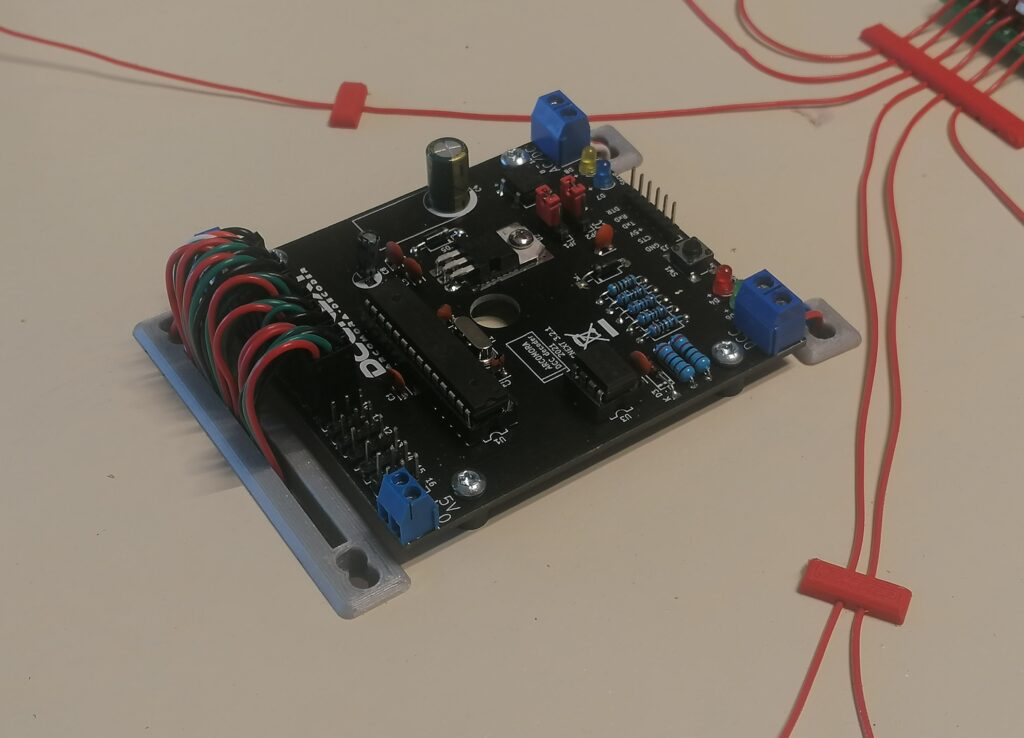
Een Arduino Nano, een LM393N comparator, 3 transistoren en enkele weerstanden waren genoeg om een werkende Loconet USB interface te bouwen. Getest met Rocrail en een Loconet bezetmelder, kwamen de meldingen netjes binnen nadat een simpele voorbeeld sketch van internet in de Arduino Nano was gezet.
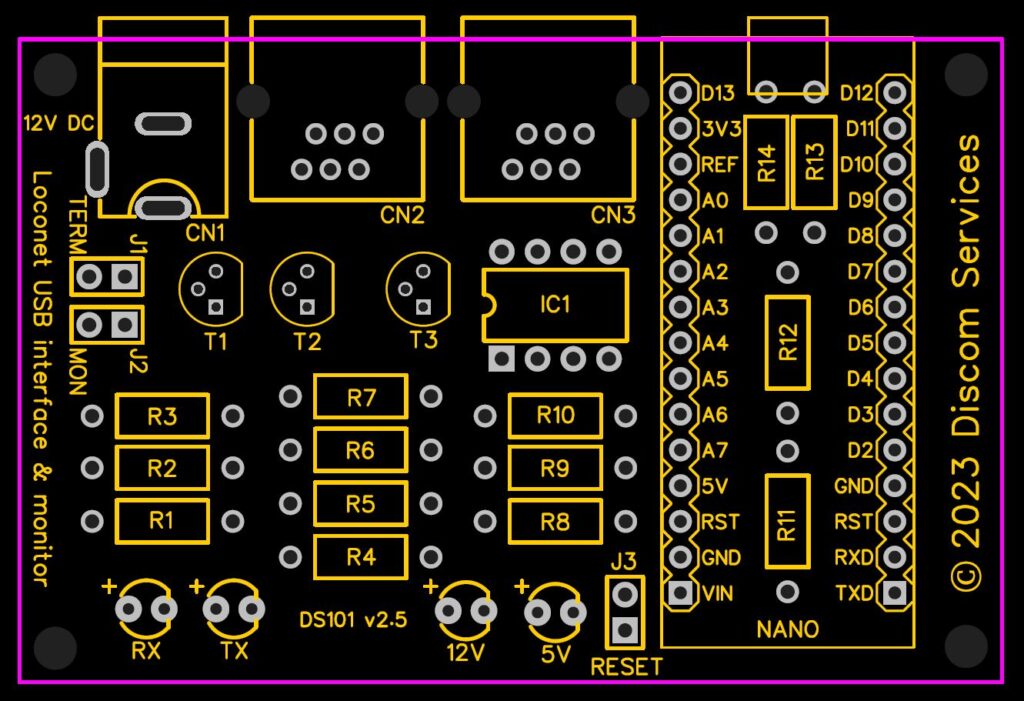
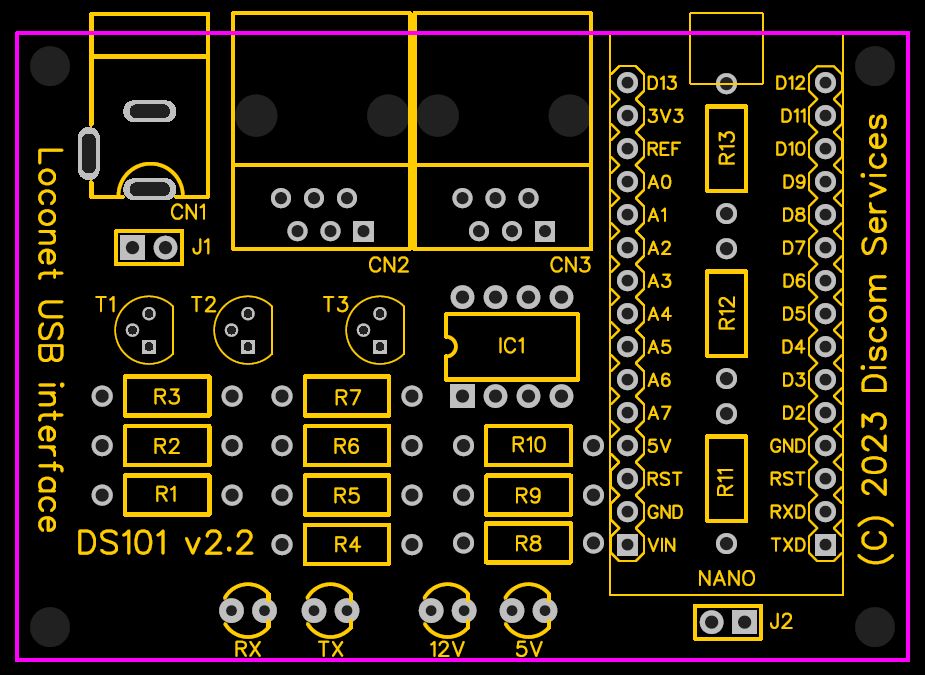
Uiteraard kunnen we niet met zo’n breadboard op de baan gaan werken dus is het schema in de computer gezet en is een compacte print ontworpen om deze componenten op de juiste wijze met elkaar te verbinden terwijl het ook nog in een doosje in te bouwen is. Aan het schema zijn twee extra leds toegevoegd die vanuit de sketch kunnen worden aangestuurd om communicatie vanuit de bus (Rx) en communicatie vanuit de software (Tx) aan te geven.
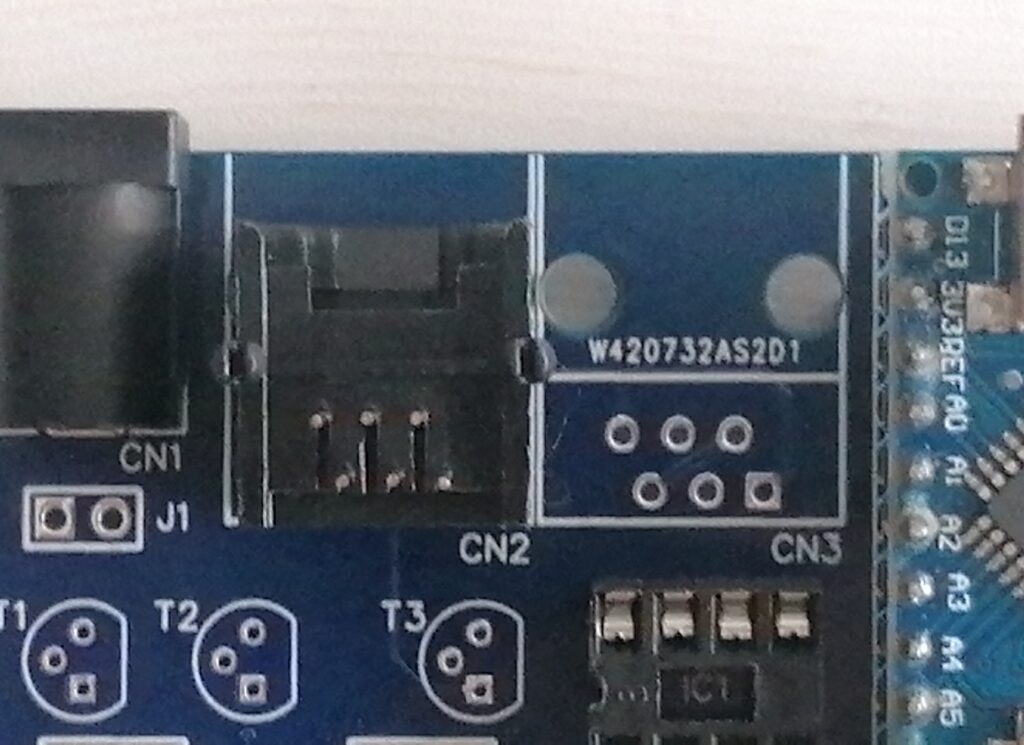
De tijdens de vakantie ontwikkelde en bestelde printen, zijn een week na thuiskomst afgeleverd. Tijdens het opbouwen van de eerste print werd al duidelijk dat er één dingetje over het hoofd is gezien. Dit had voorkomen kunnen worden door de print eerst een keer op ware grootte op papier af te drukken maar ondanks dat er veel voor de hobby meegaat op vakantie, hoort een printer daar toch niet echt bij. De zogenaamde ‘footprint’ voor de RJ12 connector is een gangbare versie maar niet degene die was ingekocht. De ingekochte versie is een stukje korter, heeft de stekkercontacten bij de print zitten en is een stuk voordeliger. Gelukkig kon de connector met wat prutsen en het wegknippen van de plastic pootjes, aan de onderzijde gemonteerd worden. Hierdoor was de print wel te testen.
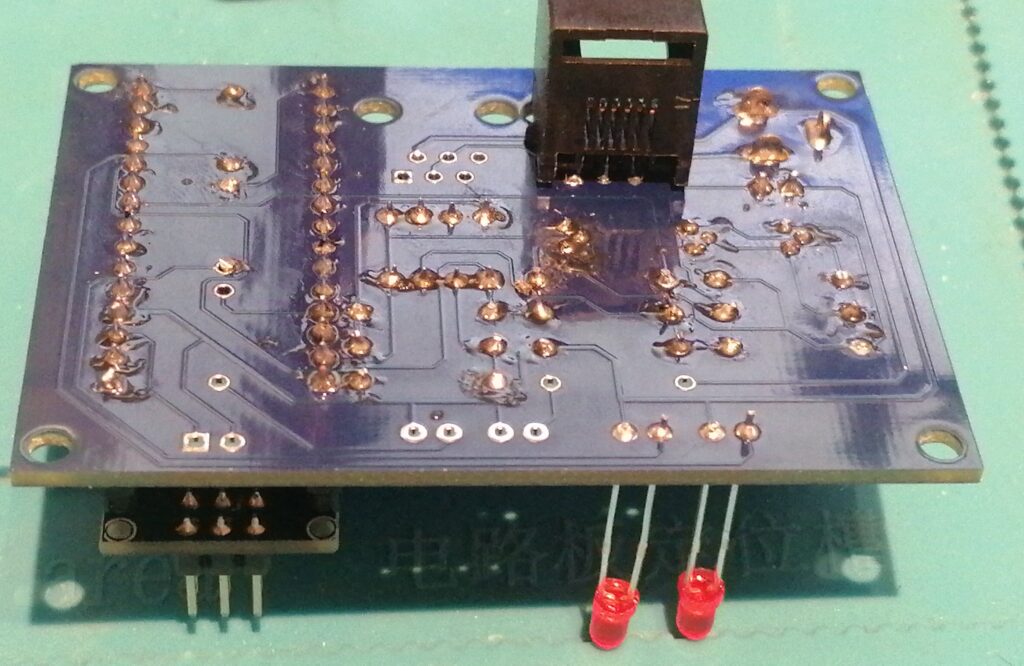
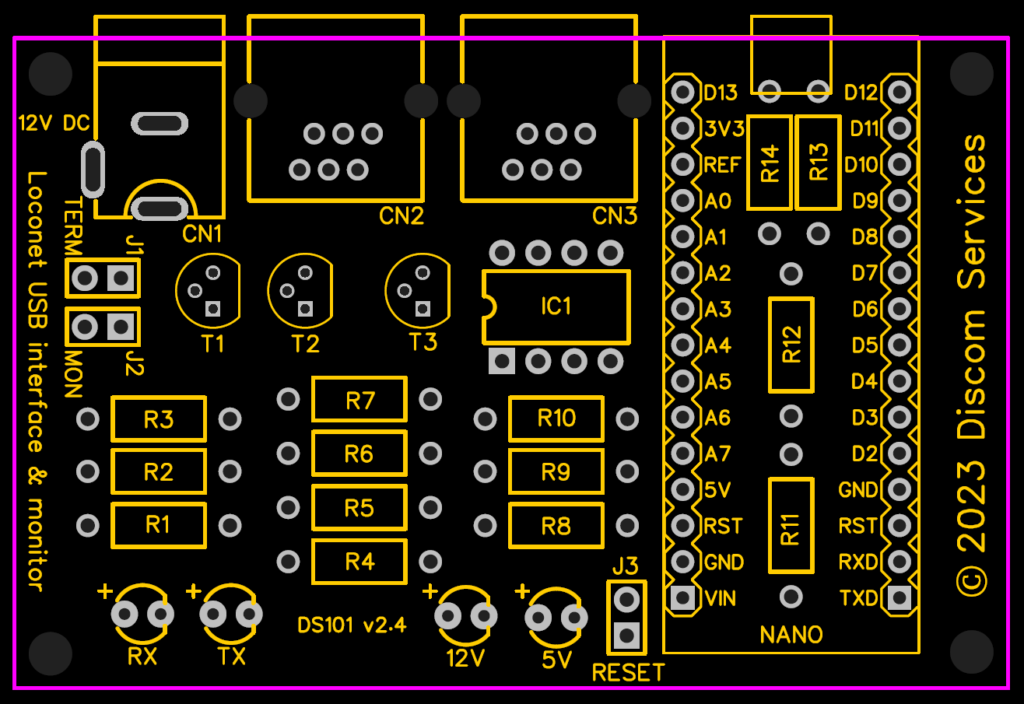
Het moment van de waarheid was aangebroken en alles blijkt uiteindelijk naar behoren te functioneren! Dat betekent dat we het laatste print ontwerp nog ietsje aanpassen zodat de bestelde RJ12 connectoren gaan passen.
Tijdens het testen is ook gebruik gemaakt van een sketch die standaard in de Loconet library aanwezig is: de Loconet monitor. Met deze sketch is eenvoudig op een computer te zien welke Loconet communicatie op de bus plaatsvind. Dat leverde het idee op om deze twee functies in één sketch te verwerken en een keuze optie toe te voegen middels een extra jumper (J2) op de print. De sketch is aangepast en werkt dus het wachten is op de definitieve versie van de printjes die samen met andere printjes spoedig besteld zullen worden. Inmiddels zijn namelijk ook Loconet verdeel blokjes voor 4 en 6 aansluitingen ontwikkeld.
Klik hier voor de volgende update…
Datum: 25-05-2023
Wederom een lange tijd voorbij. Dit komt o.a. door ons nieuwe clubgebouw waar veel tijd voor alle leden in is gaan zitten om dit gebruiksklaar te krijgen. Foto’s en informatie hierover zijn elders op de website te bekijken. De tweede oorzaak is dat onze tijd ook even verschoven is naar het afronden van de diverse modulebakken voor de grote baan. Die zijn heden afgerond (check het project modulebaan) waardoor onze aandacht nu weer uit kan gaan naar het uitwerken van een baanplan en het uittesten van de aansturingselektronica!
We hadden namelijk nog een uitdaging met de aansturing van de servo’s en relais. Mede door wat zoekwerk op internet en daarbij gevonden suggesties, zijn we tot de conclusie gekomen om hier een kleine wijziging in de gekozen techniek uit te proberen. De aansturing van servo’s, relais en later ook seinen, kan uit de baanspanning afgeleid worden. Er zijn echter ook andere manieren. Aangezien de bezetmelders via een Loconet bus worden teruggeleid naar de centrale, is het vrij eenvoudig om diezelfde bus ook te gebruiken voor de aansturing van servo’s, relais en seinen. De bus is er toch al en zo hou je die aansturing gescheiden van de aansturing van de loc decoders.
Ook de aansturing van servo’s, relais en seinen kan met commercieel verkrijgbare componenten gedaan worden maar dat betekend een grote investering. We zullen derhalve weer een op Arduino gebaseerde oplossing gaan testen om te kijken of dat aan onze wensen kan voldoen.
Klik hier voor de volgende update…
Datum: 19-12-2022
Lange tijd geen update en dat heeft een reden. We hebben wat technische uitdagingen ervaren die niet eens zozeer met de techniek te maken hebben voor het gemengd rijden maar eigenlijk met de aansturing van de servo’s. Op bepaalde momenten wil een wissel niet omgaan en dan stopt de baanbesturing. We zijn steeds in kleine stapjes per toegepast component aan het testen en analyseren en dat kost helaas wat tijd. We gebruiken nu natuurlijk verschillende componenten en daarnaast is er sprake van zowel hardware als software waar een oorzaak in gevonden kan worden. Eén van de oplossingsrichtingen is het vervangen van de toegepaste centrale. Ook een wijziging in het hardware ontwerp van de servo/relais aansturing kan verandering geven en tenslotte ook in de software daarvan. Wordt vervolgd!
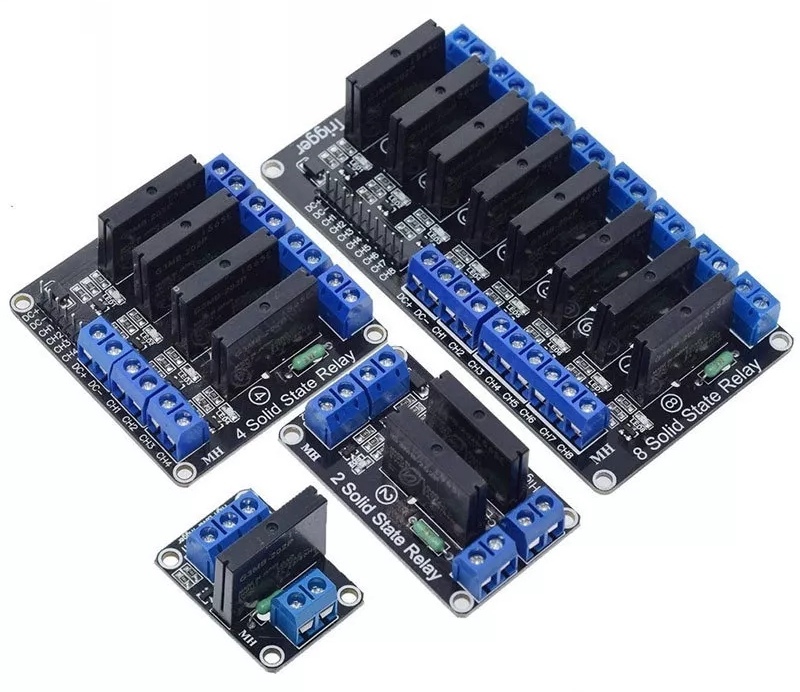
Terwijl we bezig zijn met deze analyse, zijn er ook nieuwe ideeën met betrekking tot de schakeling van de baanspanning. In plaats van het gebruik van de relais met wisselcontact, gaan we binnenkort een test doen met andere relais die alleen een maak contact hebben. Een voordeel zal dan zijn dat er minder relais nodig zijn en dat hiervoor relais gebruikt kunnen worden die minder geluid maken. De bestelling van dit andere type relais is gedaan maar de levering zal wel januari worden. Ook op dit punt gaan we dus later nog verder in.
Klik hier voor de volgende update…
Datum: 24-10-2022
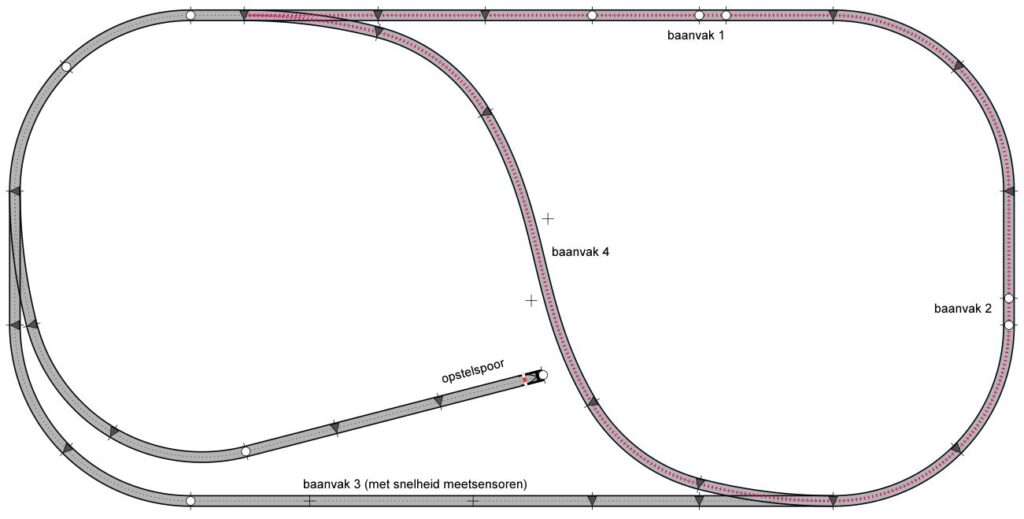
Vanavond is in principe ons doel bereikt! Omdat het relais voor de keerlus nog niet binnen is, kan een 2-rail loc nog niet over baanvak 4 rijden. Daarom hebben we twee verschillende dienstregelingen opgesteld. De eerste vertrekt vanuit baanvak 5 en gaat dan via de baanvakken 1, 2 en 3 weer naar 1 en 2 om dan vervolgens via baanvak 4 terug te keren naar baanvak 5. Deze route kan gereden worden door een 3-rail loc. De tweede route is geschikt voor een 2-rail loc en vertrekt uit baanvak 3 om dan via de baanvakken 1 en 2 weer terug te keren naar baanvak 3. Aan het einde worden beide dienstregelingen herhaald.
In de simulatie ging dit al goed op de computer maar vanavond hebben we dit ook met succes op de testbaan kunnen aanschouwen. De relais worden prima geschakeld zodra de 2-rail loc een baanvak moet gaan berijden en beide locs reden tegelijk en door elkaar de aan hen toegewezen routes af!
Er is nu nog één puntje waar naar gekeken moet worden en dat zijn de snelheden en de remvertragingen want in het begin wilde een loc nog wel eens te lang doorrijden terwijl deze tot stilstand moet komen en dan schiet hij al het volgende baanvak in. Wel een goed leermoment voor de grote baan later om na te denken waar de bezetmeldingen in een baanvak moeten zitten om dit te voorkomen. Volgende stap is dus wat testjes doen m.b.t. de snelheden maar het doel is bereikt: 2-rail en 3-rail door elkaar rijden is prima mogelijk.
Klik hier voor de volgende update…
Datum: 23-10-2022
We zijn ondertussen wat verder met de aanpassingen in Rocrail. Met dank aan Albert (van de vele Rocrail filmpjes op Youtube) z’n persoonlijke hulp, hebben we meters kunnen maken en zijn we snel veel wijzer geworden van de instellingen en mogelijkheden in Rocrail! We hebben nog een paar kleine details op te lossen maar in grote lijnen, is het nu wel duidelijk. Albert heeft overigens ook een leuke collectie video’s m.b.t. de DCC++EX Command Station gebruik makend van de Arduino die het bekijken waard zijn.
Het volautomatisch rijden vraagt nog wel het maken van een dienstregeling maar we zijn nu zover dat de relais automatisch activeren zodra een 2-rail loc ergens moet rijden en dat was wel de voornaamste uitdaging in dit project. In onze versie van Rocrail staat de taal op Engels maar met de screenshots en de Engelse termen moet het duidelijk zijn welke opties dat zijn indien de taal op Nederlands staat ingesteld.
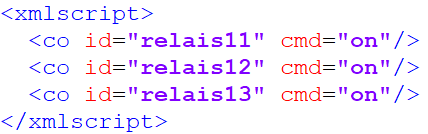
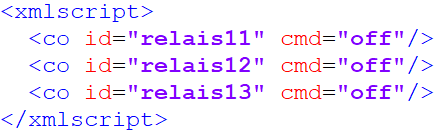
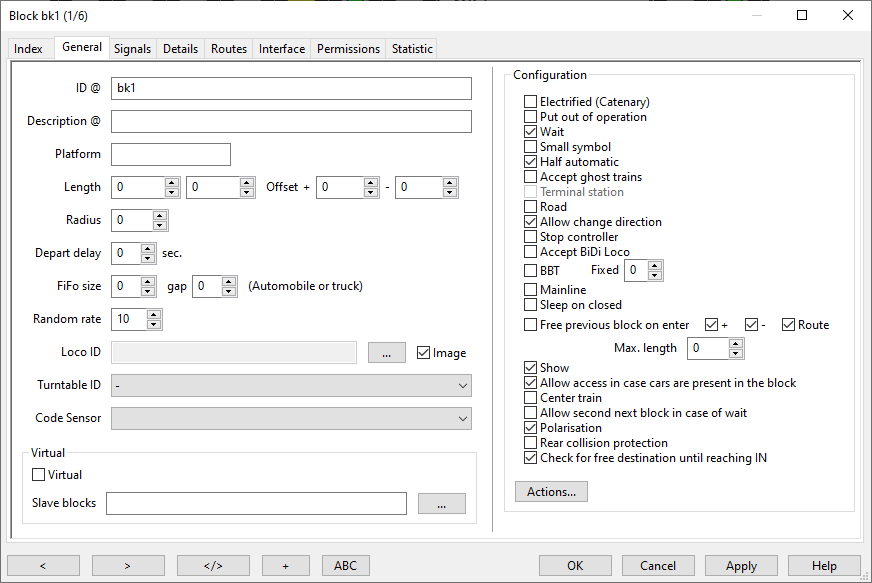
Het begint met het vervaardigen van wat simpele xml-bestanden waarin wat acties gedefinieerd staan. Er zullen vast nog geavanceerdere mogelijkheden zijn binnen de xml-files van Rocrail maar zover zijn we qua kennis nog niet. Twee xml-files regelen het activeren en de-activeren van de relais van een blok. Bijvoorbeeld voor blok 1, hebben we de relais 11, 12 en 13.
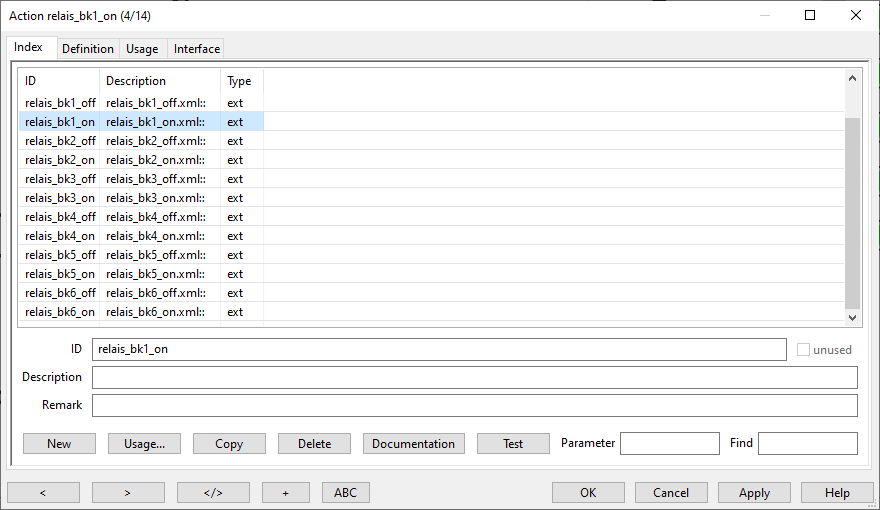
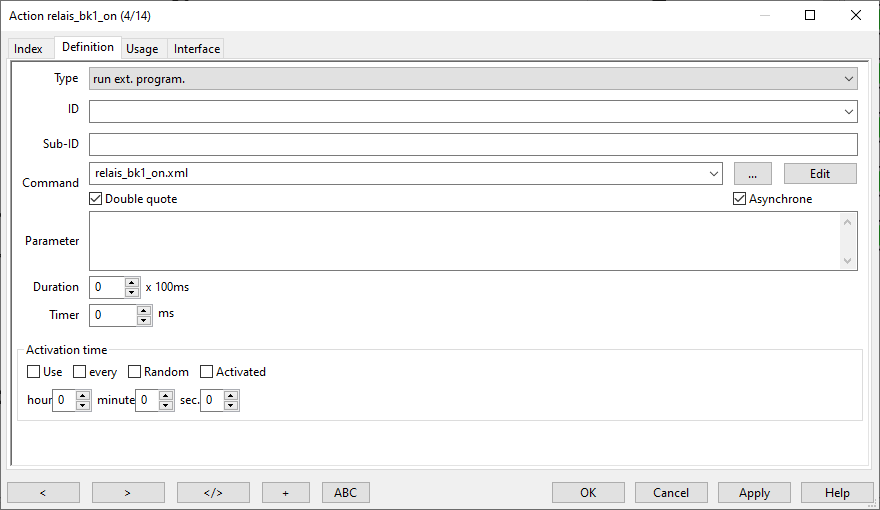
In Rocrail dien je daarna acties te definiëren die een verwijzing hebben naar deze bestanden. Je geeft een actie een naam (ID) en in het tabblad definition geef je aan dat deze actie van het type ‘run ext. program’ is en in het veld command wordt de naam van het xml-bestand ingevuld. Uiteindelijk onstaat er dan een lange lijst met gedefinieerde acties.
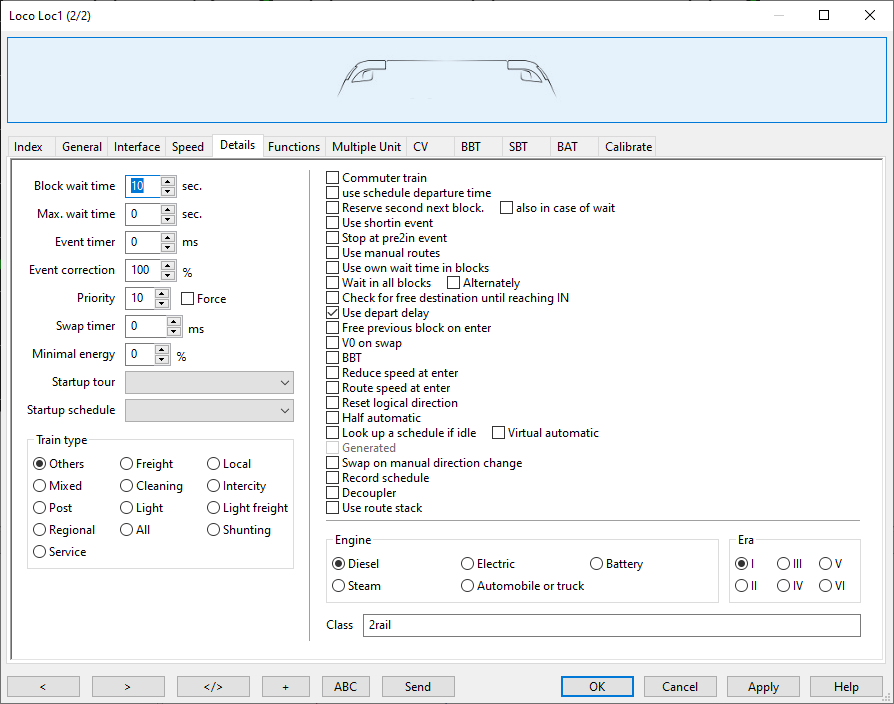
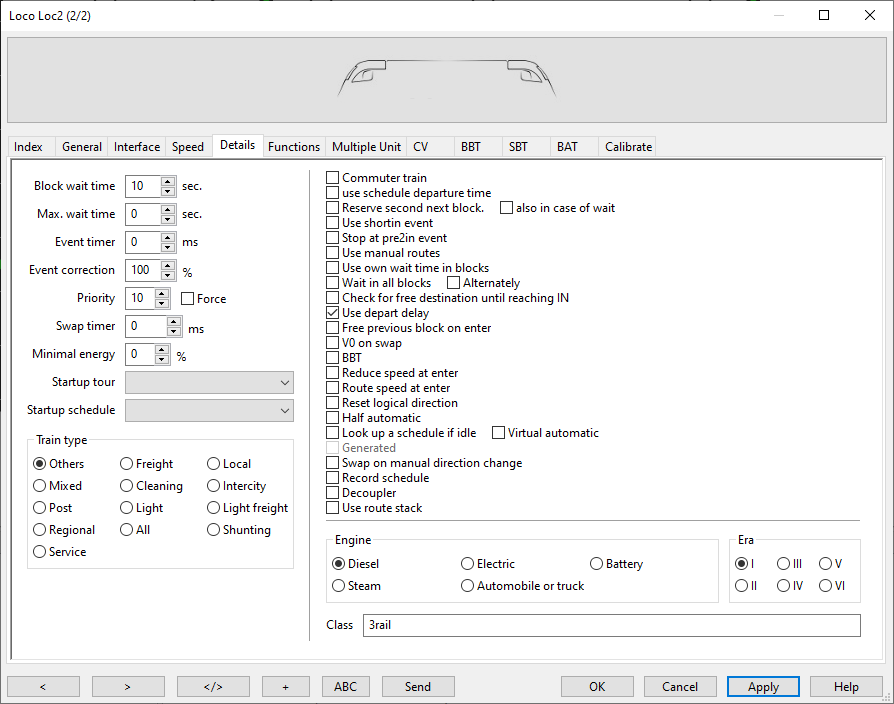
Om de acties te laten plaatsvinden op basis van een type loc (2-rail of 3-rail), zullen we in de eigenschappen van een loc kenbaar moeten maken of dit een 2-rail danwel een 3-rail loc betreft. Op dit moment is er voor gekozen om hiervoor het Class attribuut in de eigenschappen van een loc te gebruiken. Op de testbaan hebben we 2 locs gedefinieerd. Eentje met de naam Loc1 en eentje met de naam Loc2. In het tabblad details van de eigenschappen vinden we rechts onderin het veld Class:
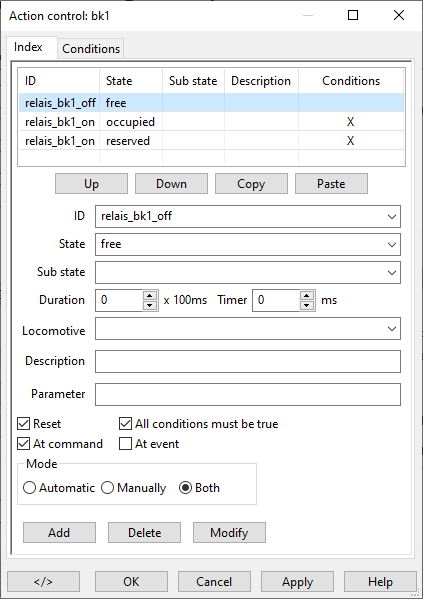
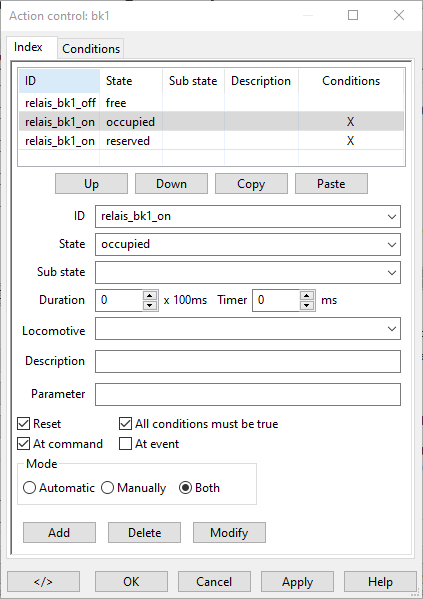
We kunnen nu het Class attribuut gaan gebruiken om de actions in te stellen. Binnen de Actions van een blok moeten we een drietal acties definiëren. Zodra een blok vrij komt, moeten de relais van dat blok uit. Daarmee staan de relais in de stand waarbij een 3-rail loc kan rijden op het betreffende baanvak. Tenslotte moeten we twee acties definiëren waarbij de relais aan moeten worden gezet, namelijk zodra een 2-rail loc in het baanvak staat (bezet, oftewel occupied door een 2-rail loc) of zodra een 2-rail loc het baanvak wil binnenrijden (baanvak is gereserveerd, oftewel reserved voor een 2-rail loc).
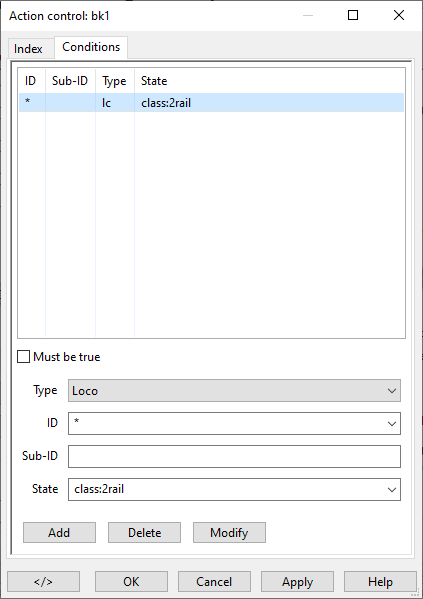
Middels deze acties die voor ieder deel van de baan gedefinieerd moeten worden, kunnen we er voor zorgen dat de relais aan gaan bij een 2-rail loc en uitblijven bij een 3-rail loc. We zullen zodra dit kan, een filmpje plaatsen om de werking van de actions te tonen.
Klik hier voor de volgende update…
Datum: 16-10-2022
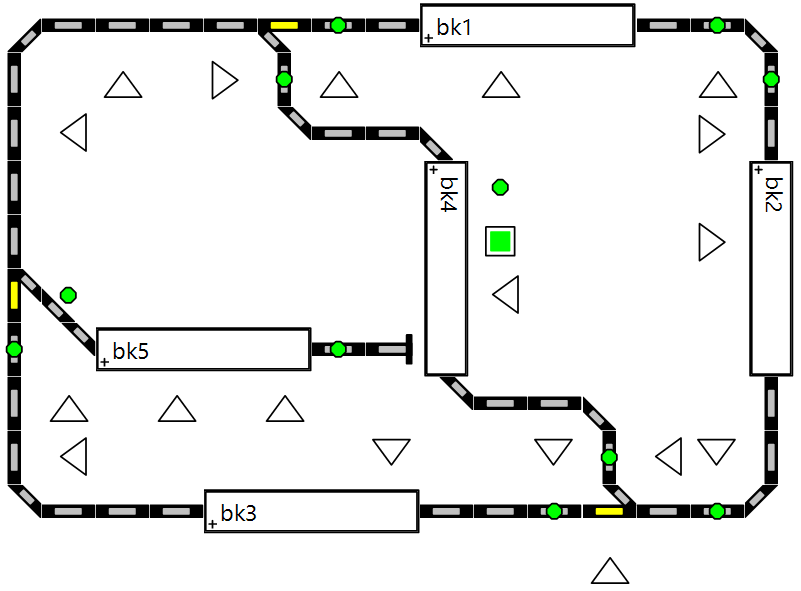
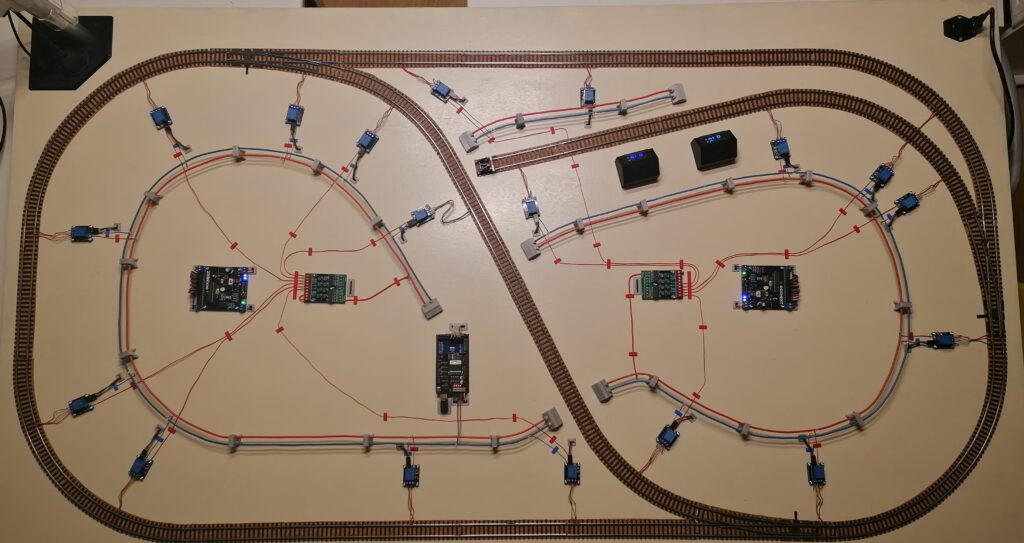
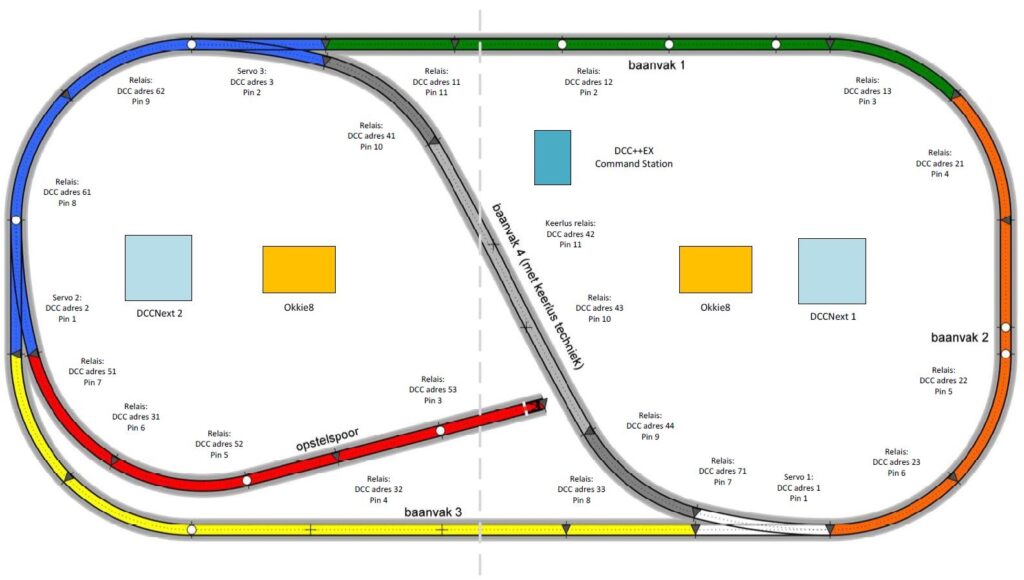
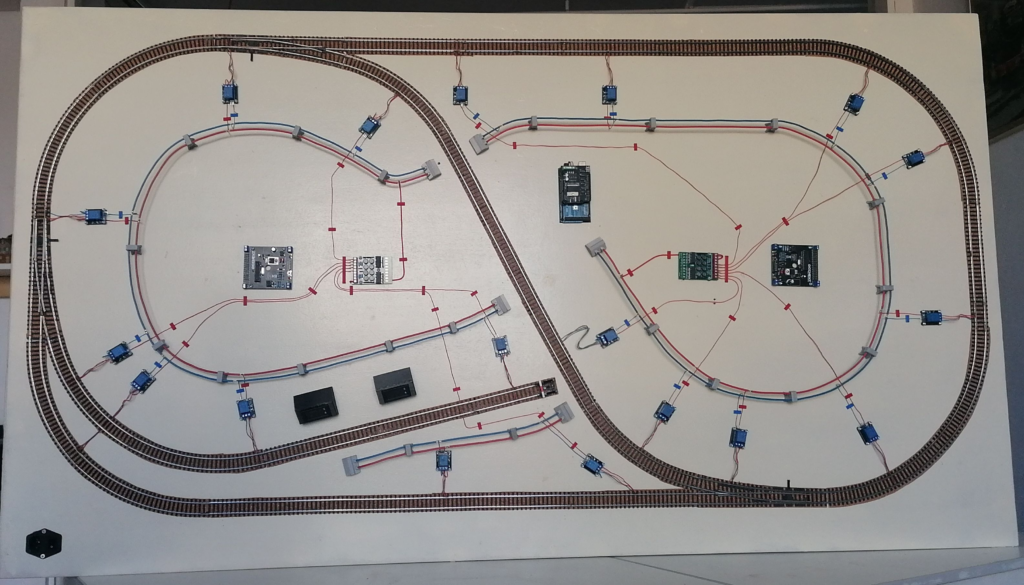
Als eerste hebben we de baan opgemaakt in Rocrail en gaan we testen in hoeverre we de relais automatisch kunnen aansturen op basis van het type loc. In het baanplan representeren de driehoekjes de relais voor de omschakeling tussen 2-rail en 3-rail.
Klik hier voor de volgende update…
Datum: 12-10-2022
Vanavond zijn de drie servo’s gemonteerd middels een eigen ontwerp servo houder. Ze zijn uiteraard ook aangesloten op de DCCNext modules en ingeregeld. Na correctie van de adressen en de ‘invert’ stand in Rocrail, werkten ze perfect vanuit de software. Alles kan nu bestuurd worden vanuit Rocrail dus we kunnen starten met de baan automatisering.


Klik hier voor de volgende update…
Datum: 10-10-2022
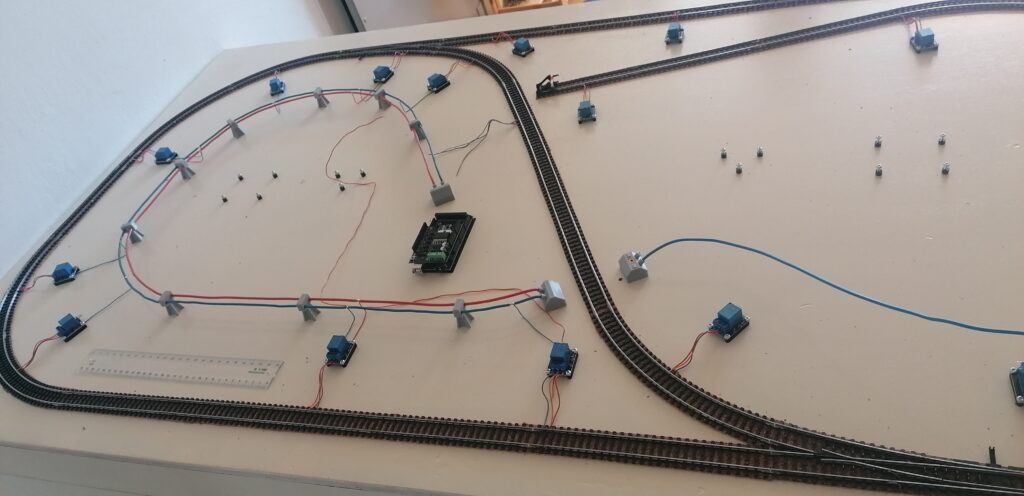
De verbinding tussen de twee Okkie8 modules en de DCC-EX centrale (Arduino Mega) is vanavond met twee voorbereide 9 polige flatcables, gerealiseerd. Aan de kant van de Arduino Mega zijn twee 9 pins male Dupont connectors aangeknepen en verbonden met de hoogste pins van de Arduino Mega. Het voordeel is dat daar ook twee pins met GND aanwezig zijn en dus ideaal om de verbinding met de Okkie8 module te maken. Die heeft namelijk ook GND nodig en biedt dan 8 pins voor een bezetmeldsignaal. Na het configureren van alle adressen van de bezetmelders (adres gelijk aan het pin nummer op de Arduino Mega), hebben we een loc rond laten rijden en konden we na eerst met geknepen billen te kijken naar het scherm een vreugde sprongetje maken toen de bezetmelders één voor één netjes aangaven wanneer de loc er overheen reed!

Woensdag de laatste bouw actie: het monteren van de drie servo’s voor de wissels.
Klik hier voor de volgende update…
Datum: 05-10-2022
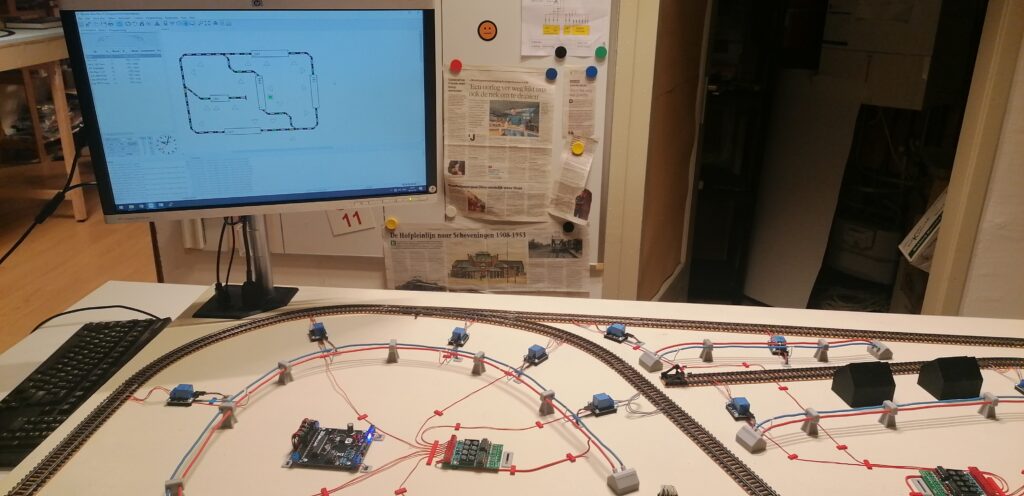
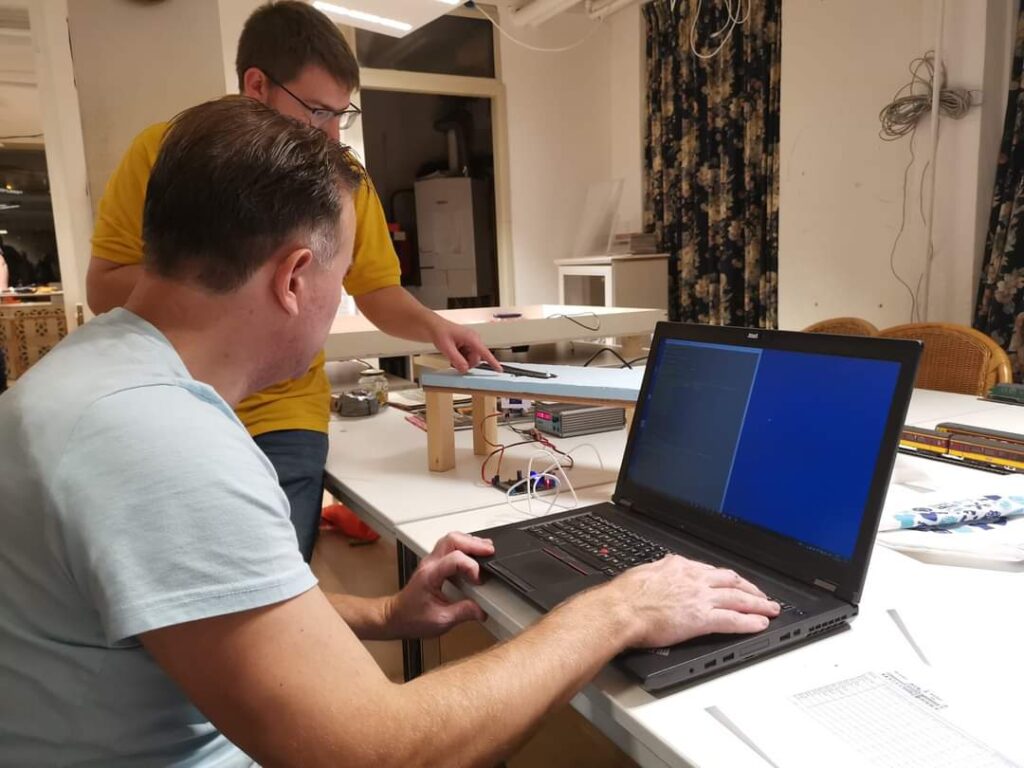
Woensdagavond zijn we begonnen om een andere monitor op de baancomputer aan te sluiten zodat de resolutie gecorrigeerd kon worden. Hierna lukte het om beeld te krijgen op de primaire monitor en is het grote verrijdbare scherm als tweede monitor aangesloten.
RocRail is het eerste pakket wat we zullen gaan testen. Nadat de driver voor de CH340 interface (Arduino) was geïnstalleerd en de Arduino Mega netjes als COM poort 3 werd getoond, kon deze in Rocrail worden opgevoerd als centrale. De eerste loc op het programmeerbaanvak kon worden uitgelezen. De loc kon met het adres worden geregistreerd in de loc lijst en deze ging zowaar rijden. So far, so good.
De volgende stap was het baanplan in Rocrail laden. Dit was reeds op een andere computer voorbereid, behoudens alle adressen van de relais, bezetmelders en servo’s. Op de computer overgezet en de baan was zichtbaar. Hierna kwam het configureren van alle adressen bij de relais aan bod. Deze zijn als accessoire in het baanplan ingetekend. Rocrail gebruikt de MADA adressering en dat is net iets anders als de DCC adressering. Je moet het e.e.a. omrekenen maar daarvoor is een handig Excel sheetje op een Rocrail wiki pagina terug te vinden. Na het invullen van het juiste adres en port waarde en niet te vergeten het vinkje te plaatsen bij ‘Switch’, waren alle relais vanuit Rocrail te bedienen!
Volgende week verder met het verbinden van de bezetmelders met de DCC++EX centrale (Arduino Mega), het testen of de bezetmeldera in Rocrail binnenkomen en het plaatsen van de drie servo’s voor de wissels.
Klik hier voor de volgende update…
Datum: 03-10-2022
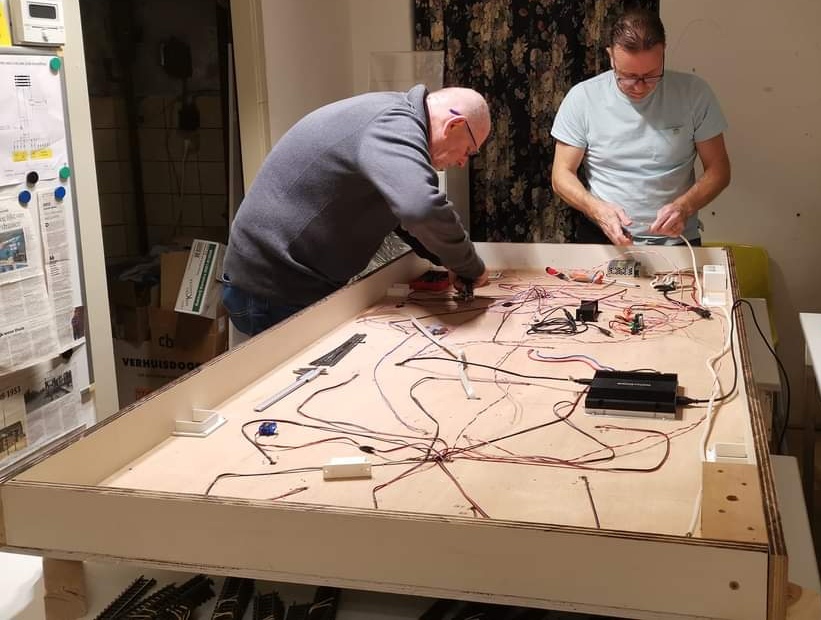
Deze maandagavond zijn we vooral bezig geweest om de bekabeling onder de baan netjes vast te zetten. Ook is de elektra onder handen genomen. Een extra aansluiting is gecreëerd om een tweede monitor op de baan aan te kunnen sluiten (zowel voor spanning als een hdmi aansluiting). De primaire monitor hangt aan een monitor arm die op de hoek van de baan is gemonteerd. Helaas stond de computer nog op een te hoge resolutie en kregen we geen beeld. Klusje voor komende woensdag. Tenslotte hebben we nog een zelf ontworpen servo houder getest voor montage onder de baan.

Klik hier voor de volgende update…
Datum: 30-09-2022
Het is weer tijd voor een korte update: de bouwfase nadert z’n einde. De beide DCCNext modules zijn geplaatst en aangesloten. Toen de benodigde Dupont kabeltjes binnen waren, zijn de kabeldoorvoeringen in zilver grijs geprint zodat ook dat er netjes uitziet. Alle relais zijn daarmee nu ook aangesloten. Voor alle relais en de drie servo’s zijn de adressen bepaald en in de beide DCCNext modules geconfigureerd. Op dit moment ligt de baan even onderste boven zodat de loshangende kabelbrei netjes geordend en vastgezet kan worden. Ook kunnen de power supply en wat andere zaken verplaatst worden want we gaan de servo’s toch gewoon onder de baan een plek geven (en dan moet je niet een power supply precies onder een wissel hebben). Dat betekend ook nog even puzzelen met de montage van de servo’s onder de baan maar ook daar is al een eerste test voor gedaan. Volgende week maandagavond gaan we onder de baan dus afronden en daarmee naderen we de eindfase van dit project: het uittesten van de besturing van de baan via iTrain, Rocrail of bijvoorbeeld JMRI.

Klik hier voor de volgende update…
Datum: 01-09-2022
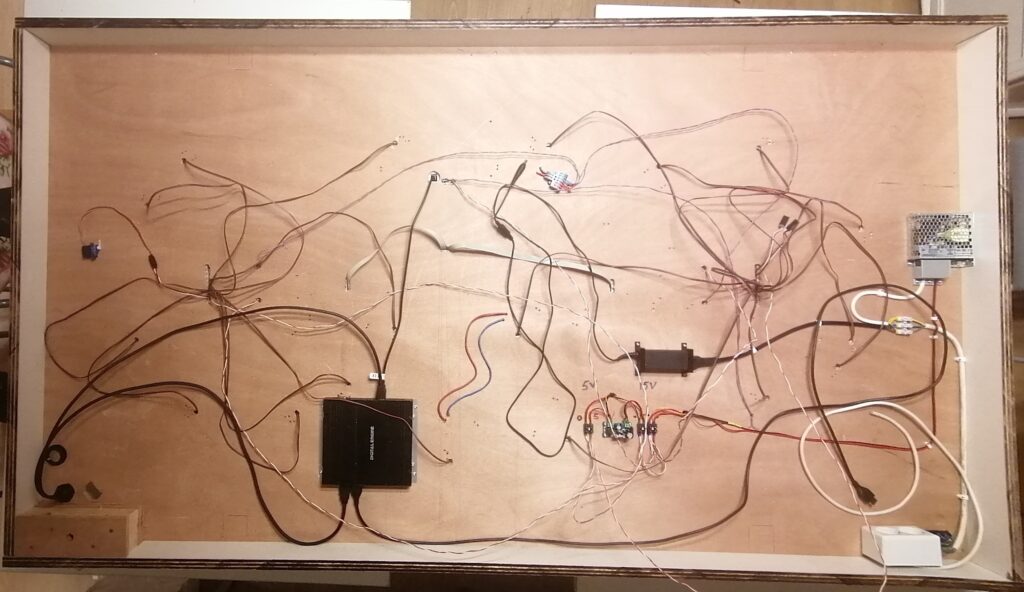
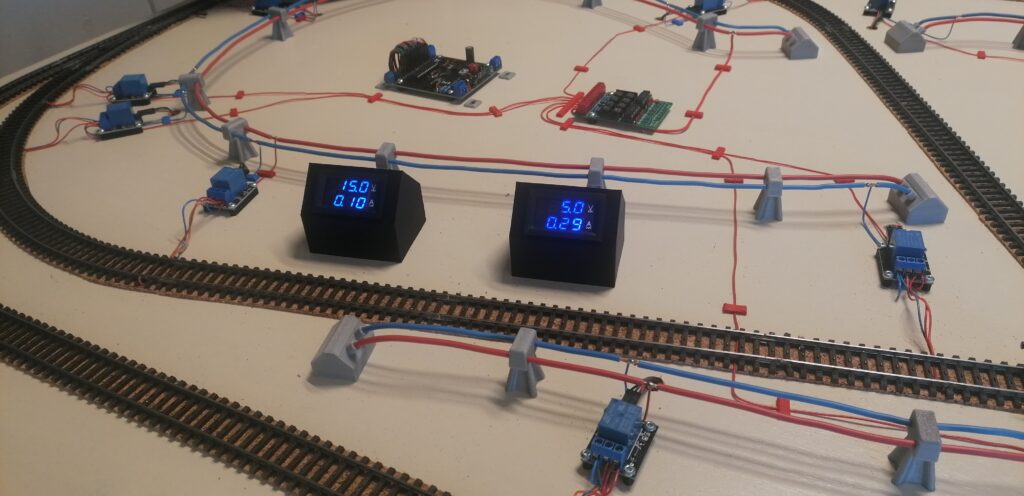
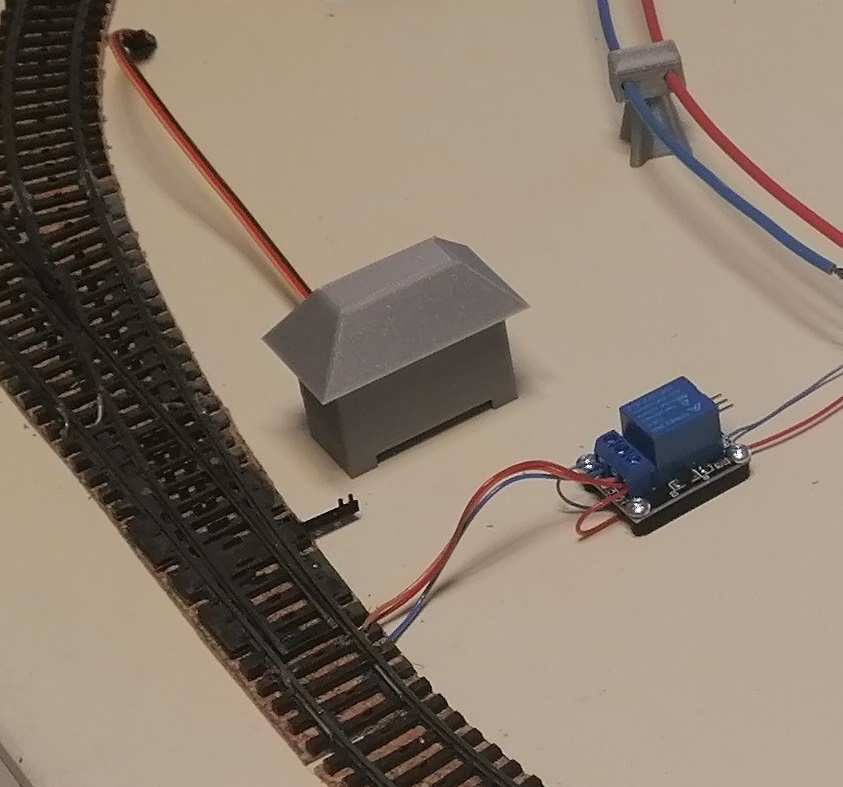
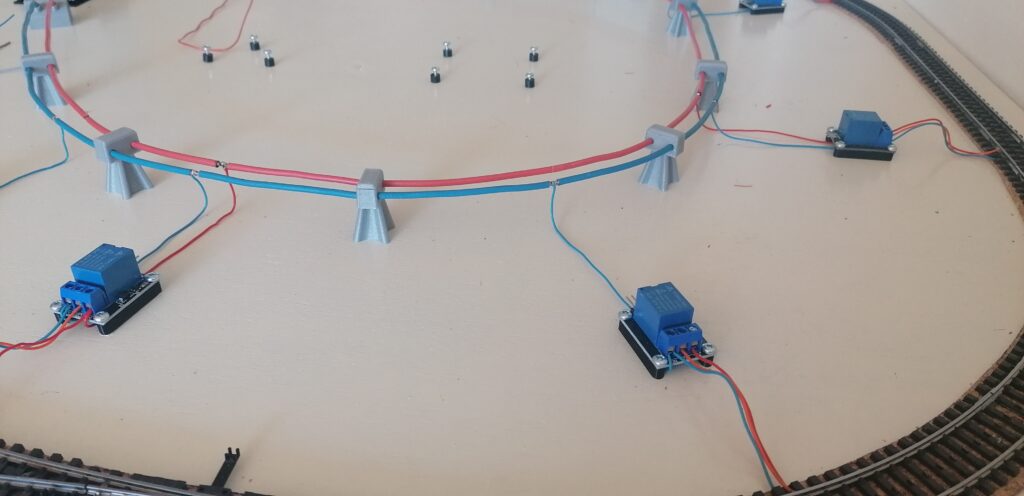
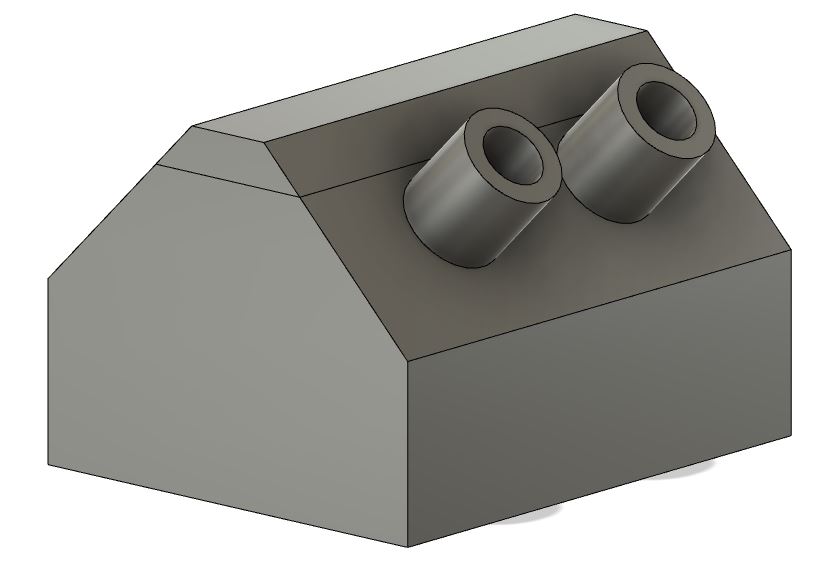
Gisteren ging er wat tijd verloren in overlegjes maar dat is vandaag gecompenseerd. De bekabeling bovenop de testbaan is qua baanspanning afgerond! Alle relais zijn ofwel direct op de baanspanning aangesloten of via een Okkie8 stroomdetectiemodule. De bedrading is in overeenkomstig gekleurde clips vastgezet op de plaat. De aansluiting voor de netspanning is eveneens gemonteerd en daarmee zijn we voor het eerst ook onder de baan met wat acties bezig geweest. Op de baan hebben ook de twee huisjes een plek gekregen die in het dak een spanning/stroom display huisvesten.
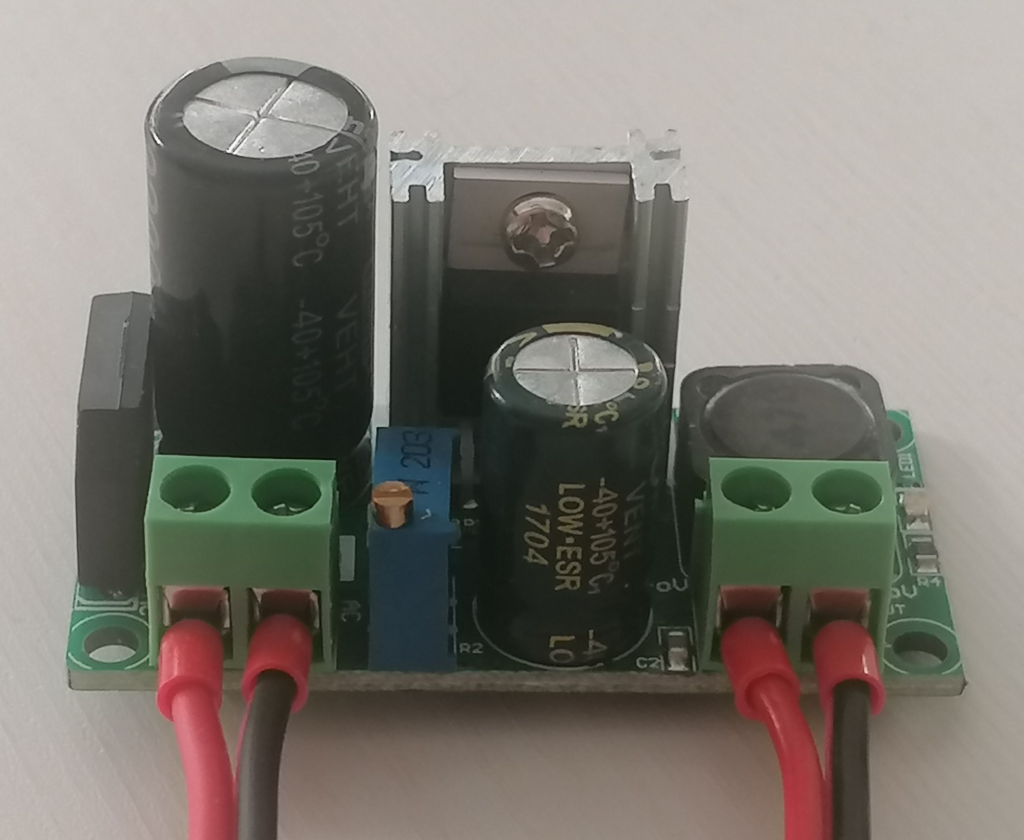
De 15V power supply is daar gemonteerd en samen met het netsnoer voor de mini computer aangesloten op de 230V. De mini computer is geplaatst. Bekabeling moet daar nog wel even netjes worden vastgezet maar dat wordt gedaan als de overige componenten ook geplaatst zijn. Naast de voeding komt er namelijk nog een kleine spanningsconverter bij om van de 15V ook een 5V af te leiden. Deze 5V is nodig voor de aansturing van servo’s en relais.
Klik hier voor de volgende update…
Datum: 31-08-2022
De bekabeling op de baan is vrijwel afgerond. De meeste relais voor baanvakdelen die geen stroomdetectie krijgen, zijn met beide aders op de baanspanning aangesloten. De volgende stap is de rode aders van de relais die wel stroomdetectie moeten krijgen, aansluiten op de Okkie8 modules. Deze aders zullen we met rode clipjes vastzetten en uiteraard kunnen dan kleine blauwe clipjes voor de blauwe aders niet ontbreken. Tenslotte zijn de in de vakantie voorbereide DCCNext modules getest en werkend bevonden nadat we ze met een Märklin CS3 konden aansturen. Het moment dat de baan van spanning kan worden voorzien en de eerste 3-rail loc een rondje kan rijden, zit er aan te komen en dat komt goed uit want op 15 en 16 oktober zullen we te gast zijn op het Modelspoorfestival georganiseerd door MSV Schiespoor en daar gaan we o.a. deze baan naar meenemen en de techniek toelichten.
Klik hier voor de volgende update…
Datum: 20-08-2022
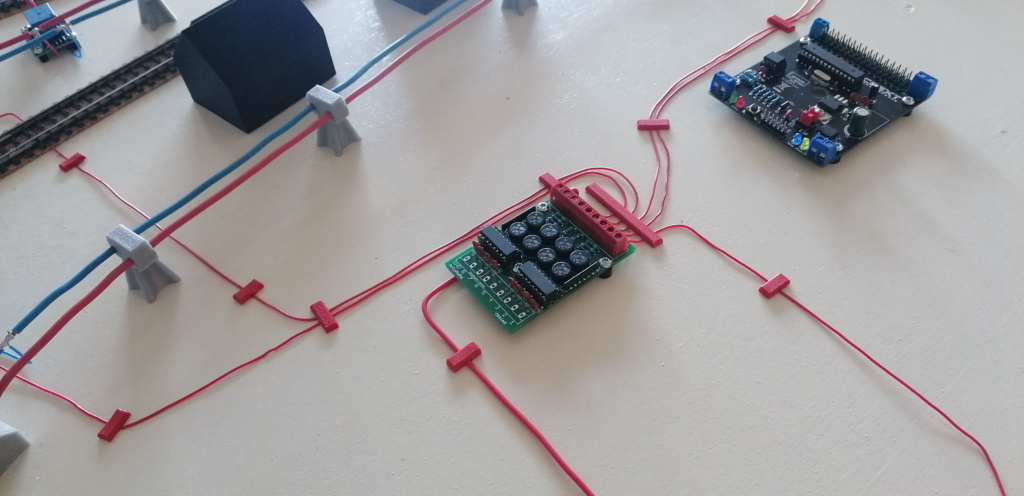
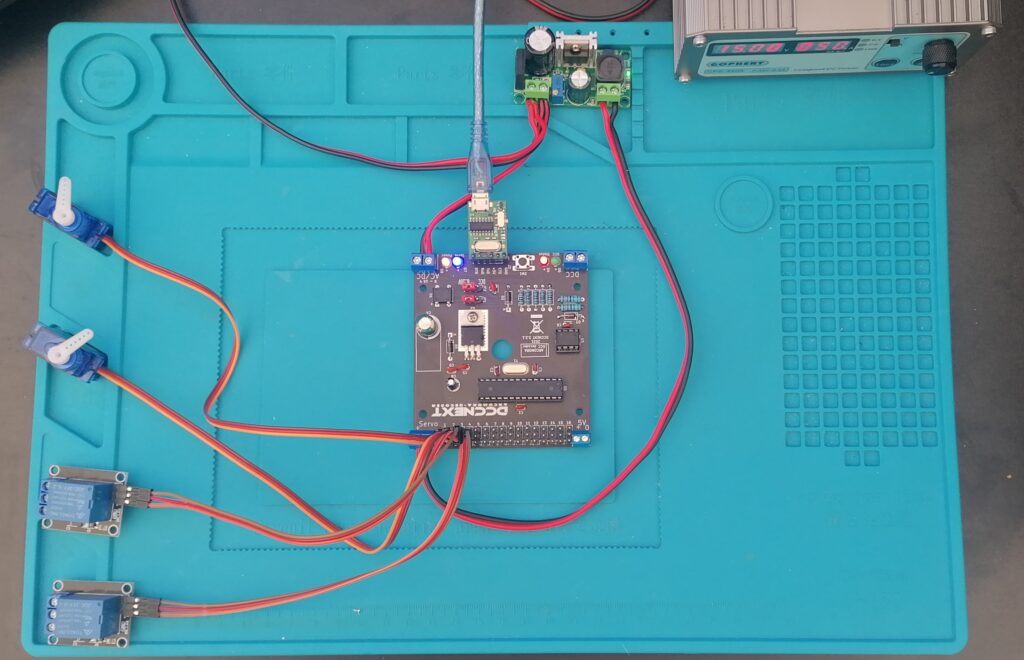
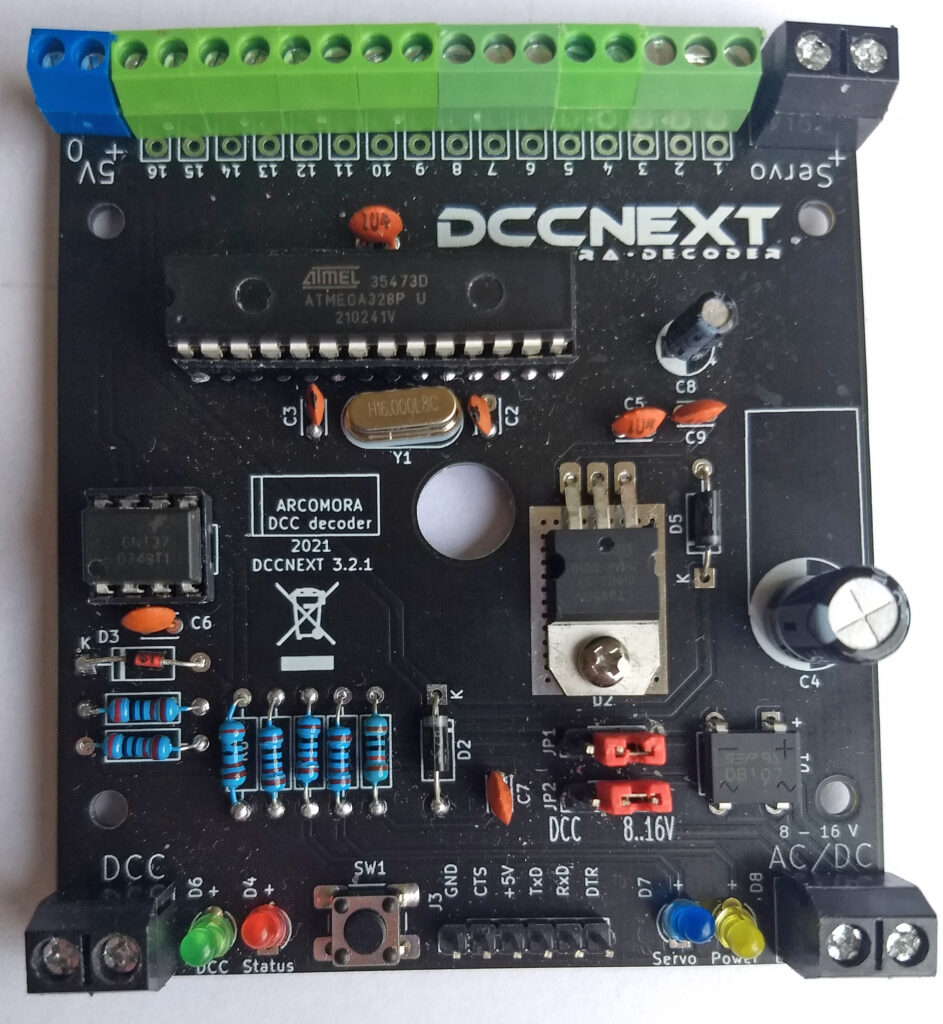
Testopstelling gemaakt met een DCCNext module, twee servo’s en twee relais. De power supply staat ingesteld op 15V. Een extra ‘step down converter’ (naast de power supply) verzorgt een 5V spanning van de 15V van de power supply. De DCCNext module krijgt uiteindelijk 3 spanningsbronnen aangeboden: 8-16V voor het functioneren van DCCNext module zelf, 5V voor de voeding van aangesloten servo’s en relais en tenslotte de baanspanning via welke DCCNext z’n commando’s zal gaan ontvangen (dat laatste is op onderstaande foto nog niet aangesloten). De aansturing gaat nu nog via de terminal sessie van de laptop naar de DCCNext module. Volgende stap is uiteraard deze aansturing te testen met een Command Station er tussen en aansturing via DCC commando’s.
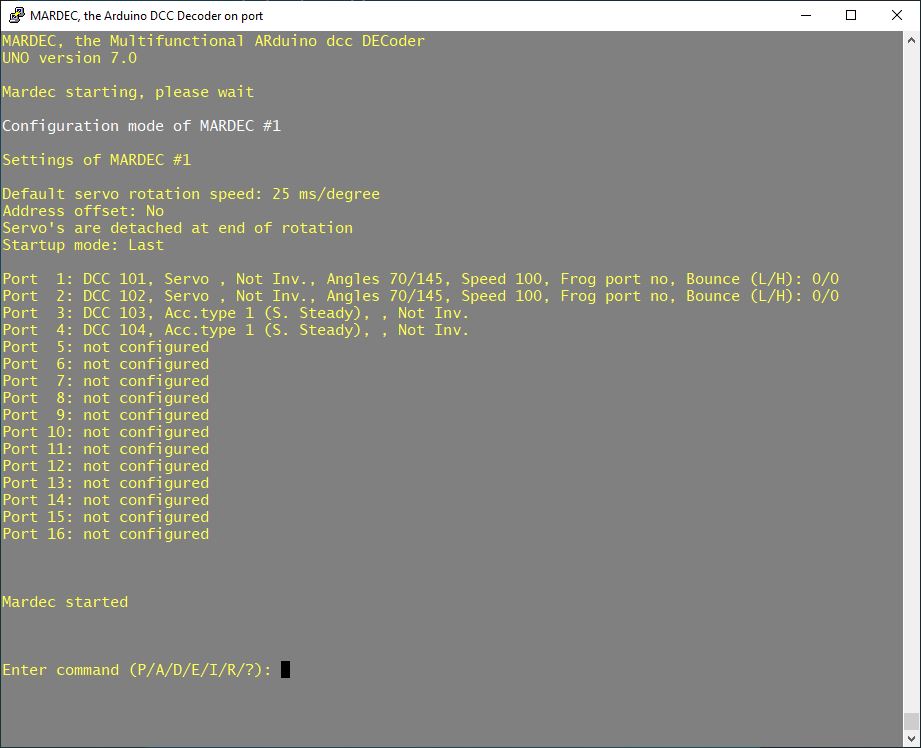
De poorten 1 en 2 zijn geconfigureerd voor een servo en poorten 3 en 4 voor een relais.
Klik hier voor de volgende update…
Datum: 19-08-2022
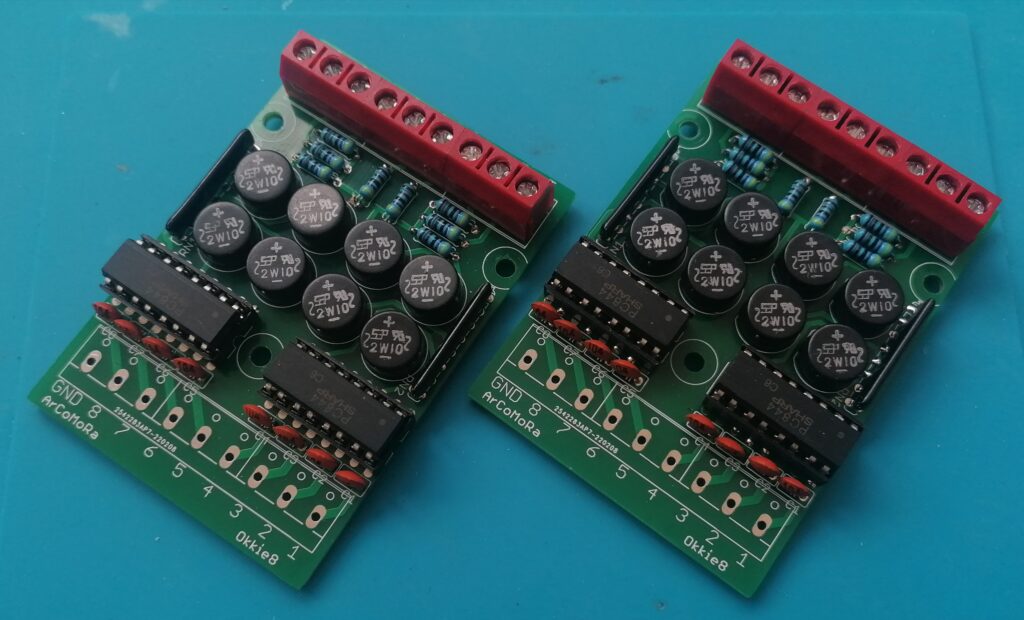
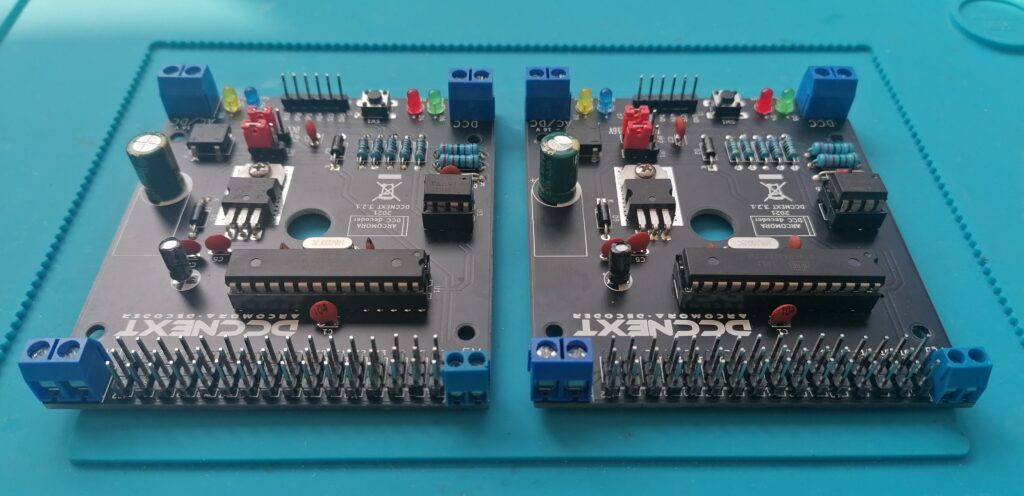
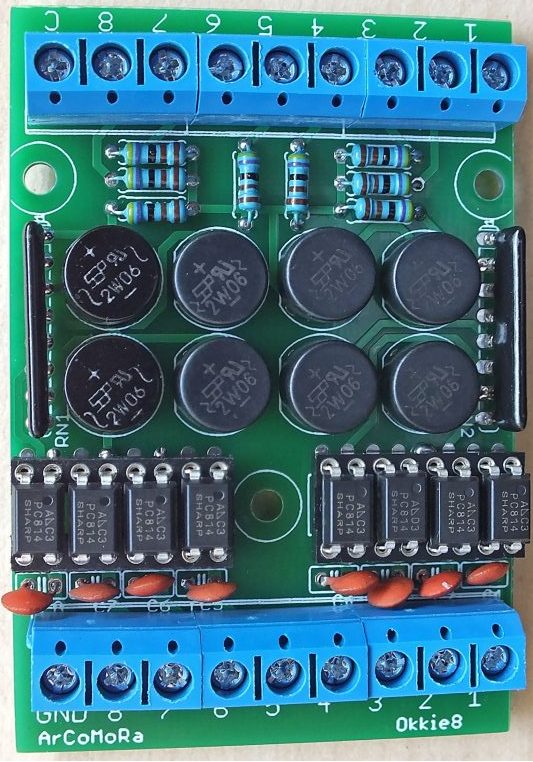
Omdat op de stroomdetectieprintjes (Okkie8, ook te gebruiken i.c.m. Arloco) de rode baanspanningsdraad bevestigd zal worden, zijn de blauwe schroefaansluitingen vervangen door de rode exemplaren. Het oog wil ook wat. Daarna zijn de beide DCCNext printjes onder handen genomen. Op alle uitgangen zijn nu 3 polige pin headers geplaatst omdat deze printjes zowel de servo’s als de relais zullen gaan aansturen en die beide met 3 aderige kabeltjes aangesloten dienen te worden. De volgende stap is het programmeren van de DCCNext printjes. Arcomora heeft twee programma’s (‘sketches’) om toe te passen. Eentje voor seinen (Arsigdec, met een complete bibliotheek aan (inter)nationale seinen en hoe deze lichtsignalen geven) en eentje voor de aansturing van wissels (relais) en servo’s (Mardec). Voor de test/demo baan hebben we dus de laatste nodig. Met een klein opzetprintje voor de seriële interface, wordt deze software er in geprogrammeerd. Daarna kan middels diezelfde seriële interface met een aangesloten laptop en terminal programma, Mardec programmeerd worden. Iedere uitgang kan zo z’n specifieke instellingen krijgen.
Klik hier voor de volgende update…
Datum: 09-08-2022
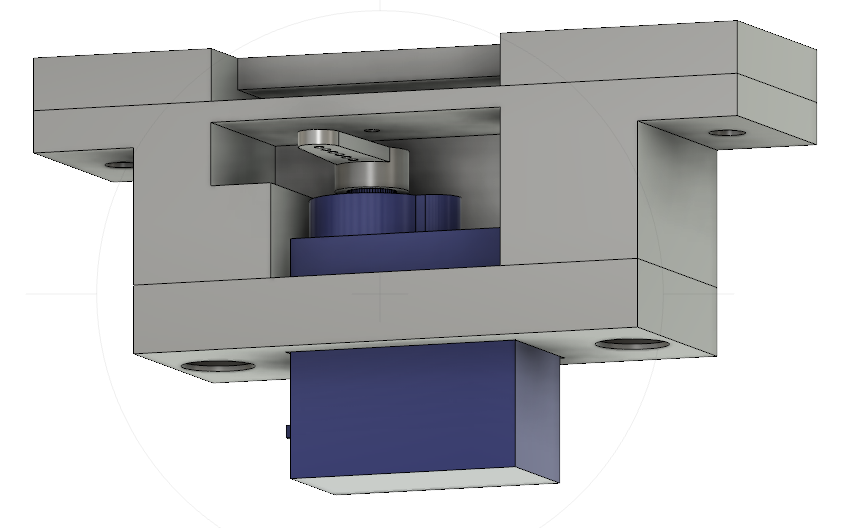
Het rode schakeldraad is uiteindelijk gevonden dus over twee weken, na de vakantie, kunnen we direct verder met de bekabeling. In de tussentijd zullen de twee DCCNext modules van extra aansluit pennen worden voorzien, zal de juiste software er in gezet worden en zullen ze getest worden op de aansturing van servo’s en relais. Tenslotte zullen we nog een servo montage houder gaan ontwerpen. Er zijn er genoeg te vinden op internet maar die zijn natuurlijk bedoeld om de servo onder de baan te monteren. Op deze test- en demo baan willen we die zichtbaar aan de bovenzijde hebben dus dat vraagt wellicht een aangepast ontwerp. Hieronder nog wat detail foto’s van de bekabeling zover.
Klik hier voor de volgende update…
Datum: 08-08-2022
De eerste spanningsmastjes zijn geplaatst en het blauwe en rode schakeldraad lopen mooi langs de baan. Helaas komen we nog een stuk rood tekort dus daar zijn we nog naar op zoek. De draadjes voor de relais zijn op de juiste lengte gebracht en kunnen worden gemonteerd.

Klik hier voor de volgende update…
Datum: 06-08-2022
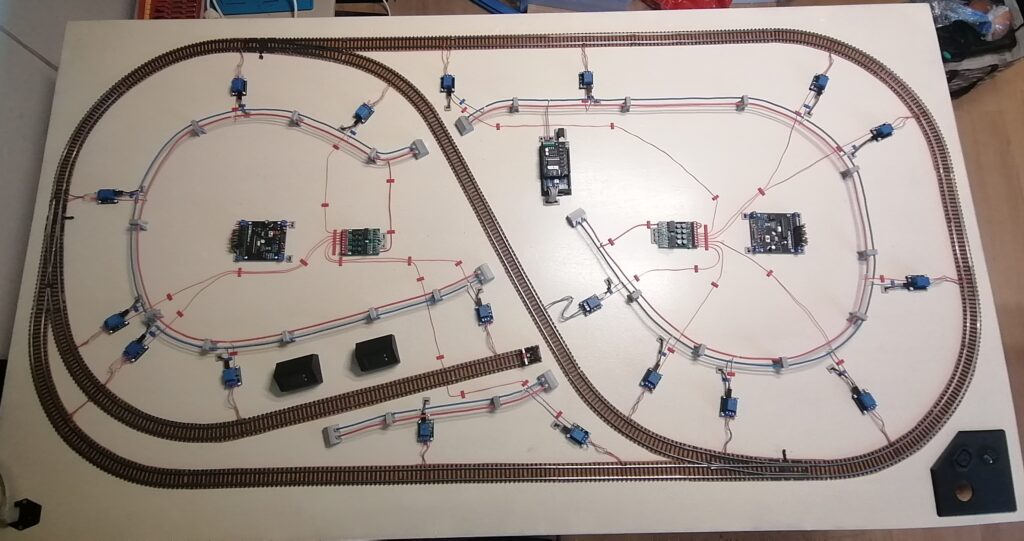
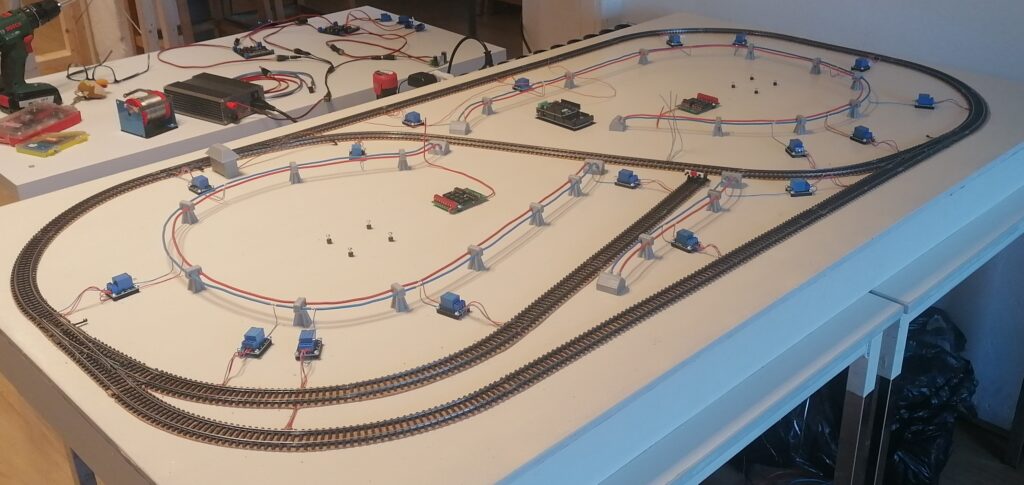
Eindelijk een flinke voortgang in de opbouw van de testbaan. De rails liggen vast op een laagje kurk en alle benodigde bedrading is er aan gesoldeerd. De drie wissels zijn ook ‘voorbereid/aangepast’. Daarnaast zijn alle relais die nodig zijn om een (deel van een) baanvak op de juiste wijze van de baanspanning te voorzien, naast de rails aangebracht. Deze relais moeten er voor gaan zorgen dat een stuk rails voor 2-rail danwel 3-rail gebruik op de baanspanning wordt aangesloten. Komende week zal er verder gewerkt worden aan het aansluiten van de bedrading aan deze relais.
Om de baanspanning leuk demonstratief op de baan te tonen, zijn we op zoek gegaan naar een niet meer gangbare kleur schakeldraad. Gebruikelijk zijn natuurlijk bruin, blauw en geel/groen. Onze baanspanning word met rood en blauw aangebracht. Vroeger gebruikte men andere kleuren schakeldraad, te weten groen, rood en grijs. Op zoek in de garage en zowaar een stuk rood schakeldraad gevonden wat hopelijk lang genoeg is. Daarna nagedacht over een manier om dit mooi en tevens functioneel op de baan vast te zetten en de hoogspanningsmasten die te zien waren tijdens een autorit, bracht wat inspiratie. Twee ontwerpjes om de bedrading een route af te laten leggen en een stukje ondergronds af te laten leggen, zijn getekend en worden vervaardigd.
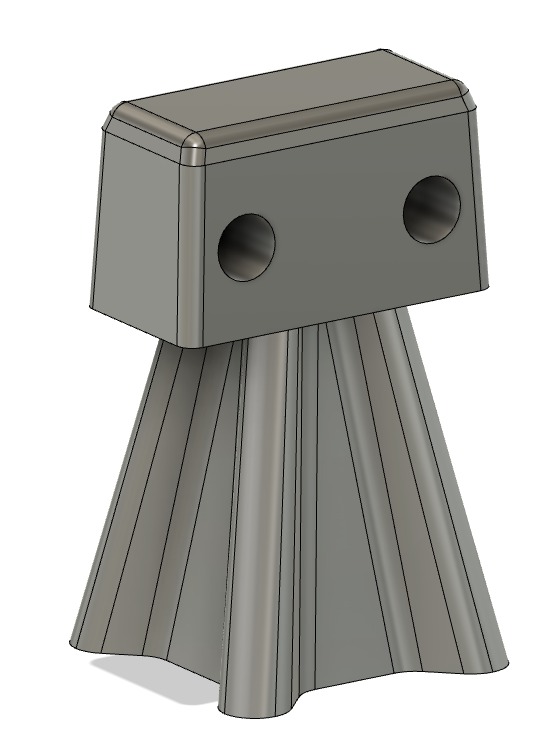
rond te geleiden langs de diverse relais.
Klik hier voor de volgende update…
Datum: 23-05-2022
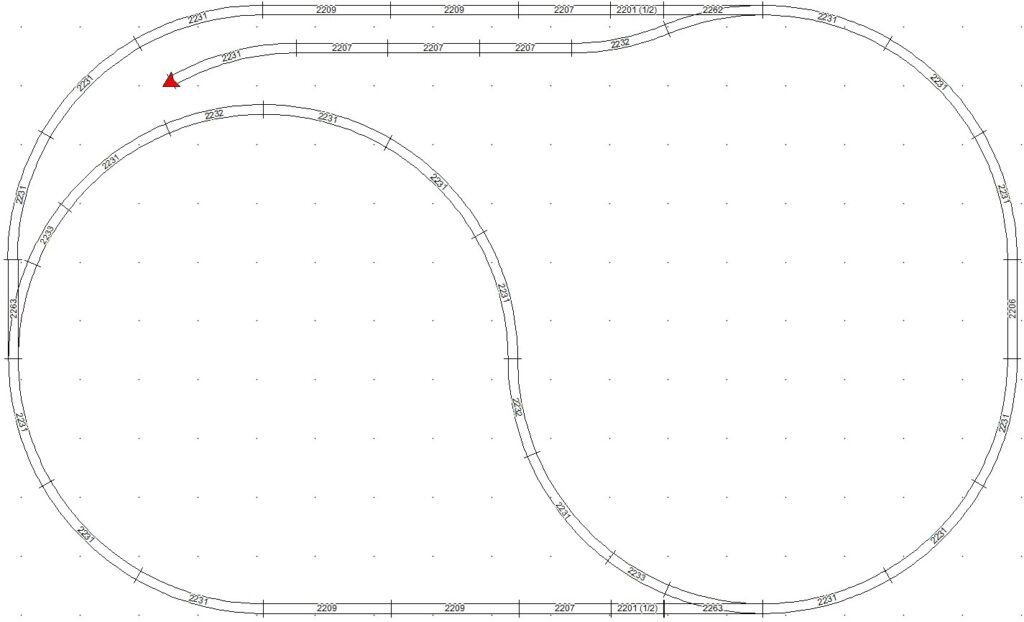
Er is weer een kleine aanpassing aan het ontwerp van de testbaan gedaan. Er zijn twee langere rechte railstukken (Märklin 2209) toegevoegd omdat die aan het begin of einde van een baanvak zitten en daar stroomdetectie op zal worden toegepast. Een iets langer recht stuk, geeft ook een wat langere stroomdetectie.

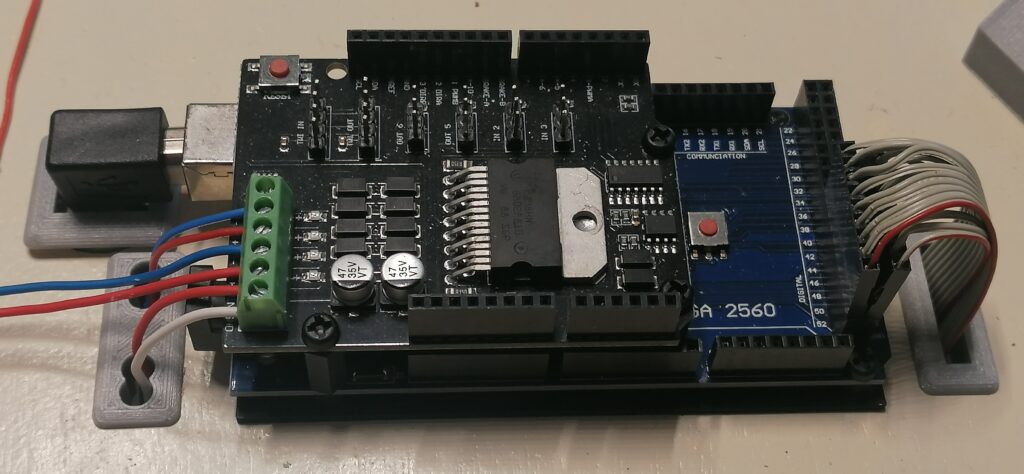
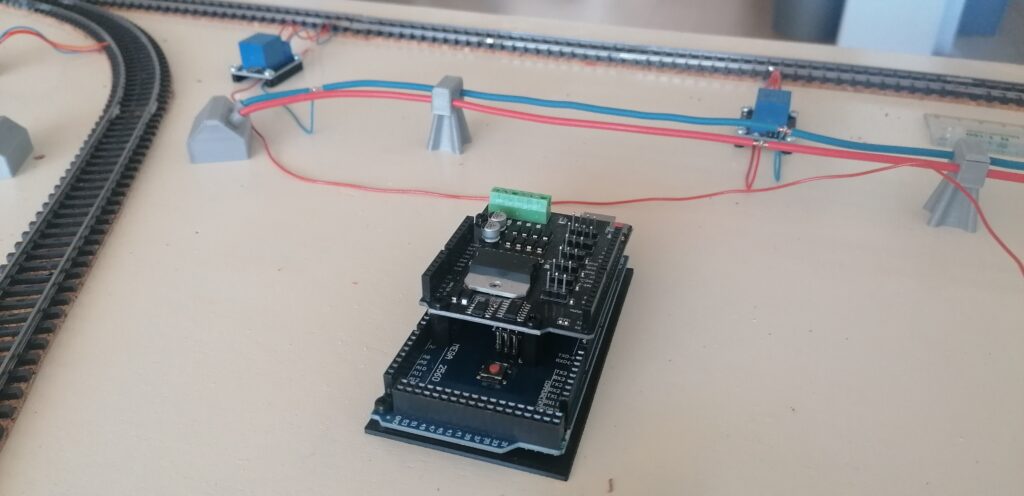
Zoals het er nu naar uitziet gaan we de testbaan proberen aan te sturen via een Arduino Uno i.c.m. een motorshield (voor het genereren van de digitale baanspanning). Hierop zal DCC++EX worden geïnstalleerd. DCC++EX is een open source (gratis) command station ontwerp waarmee op zeer eenvoudige wijze en tegen extreem lage kosten een DCC command station kan worden opgebouwd. In de huidige versie van DCC++EX zitten zelfs automation mogelijkheden waarmee een treinbaan zonder aanvullende computer, automatisch gestuurd zou kunnen worden. Voor onze modulebaan is dat geen noodzaak en optie. De keuze voor de Arduino icm motorshield is slechts vanwege de lage investering en omdat de werkelijke uitdaging zit in de aansturingssoftware die de command station zal gaan aansturen. De Arduino met motorshield is niet meer dan een interface tussen de computer en de baan.

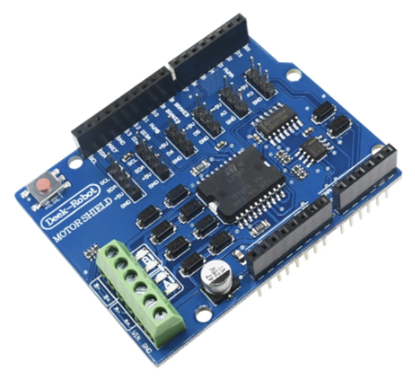
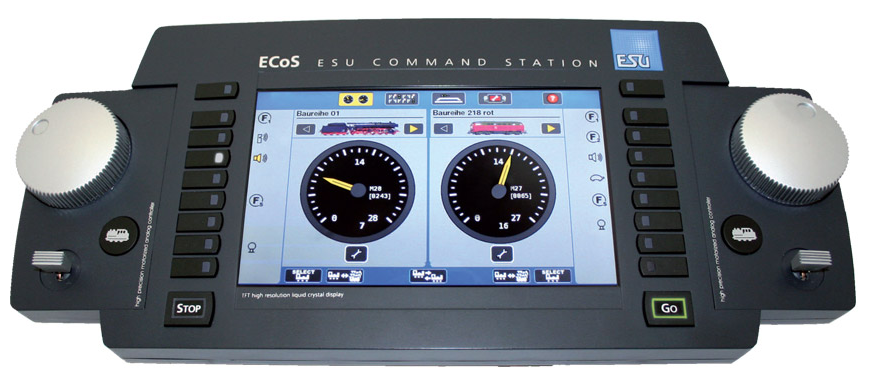
De reden dat we deze combinatie niet voor de modulebaan zullen gaan gebruiken, zit in het feit dat met deze opzet alleen een DCC signaal kan worden gegenereerd en niet een door Märklin toegepast protocol, zoals mfx. Voor de testbaan is dat echter geen probleem. Er zijn ook Märklin treinen/decoders die DCC ondersteunen. Op de testbaan zullen we daarom twee treinen laten rijden die beide DCC ondersteunen. Het enige verschil zal zijn dat de 2-rail trein de spanning via beide railstaven zal afnemen en de 3-rail trein via de railstaven en de middenrail. De focus zal bij de testbaan dus liggen op de aansturingssoftware (bijvoorbeeld Rocrail) en het op de juiste manier verbinden van de digitale baanspanning op een baanvak. De modulebaan zal aangestuurd gaan worden via de ESU ECoS2 welke wel alle gewenste protocollen ondersteund. Deze ESU ECoS2 zal uitgebreid worden met de ESU Lnet converter die de centrale zal uitbreiden met een Loconet bus. Via de Loconet bus zullen de terugmeldingen plaatsvinden van treindetectie segmenten.

Voor het treindetectie zal gebruik worden gemaakt van stroomdetectie. Dat is de mooiste treindetectie optie zonder zichtbare modules op de baan. Op dit moment is de ontwikkelaar van Arcomora bezig met LocoNext, een all-in-one oplossing voor 16 stroomdetectie opties i.c.m. een Loconet interface, eveneens gebaseerd op een Arduino (ATMega) chip. De toekomstige LocoNext module lijkt zeer geschikt voor toepassing op de modulebaan van de vereniging. Een andere ontwikkeling van Nico van Arcomora, is DCCNext. Dit is eveneens een all-in-one oplossing om seinen, wissels, servo’s, etc. aan te sturen. Voor de testbaan, waar we geen noodzaak hebben voor een Loconet bus en de stroomdetectie signalen direct kunnen aansluiten op de Arduino, zullen we gebruik gaan maken van twee Okkie8 modules van Arcomora. Deze module biedt 8 stroomdetectie kanalen. Uiteraard is de toepassing van deze modules onderdeel van het doel van de testbaan: het compleet uitwerken van de technische aansturing van onze modulebaan.
Klik hier voor de volgende update…
Datum: 21-02-2022
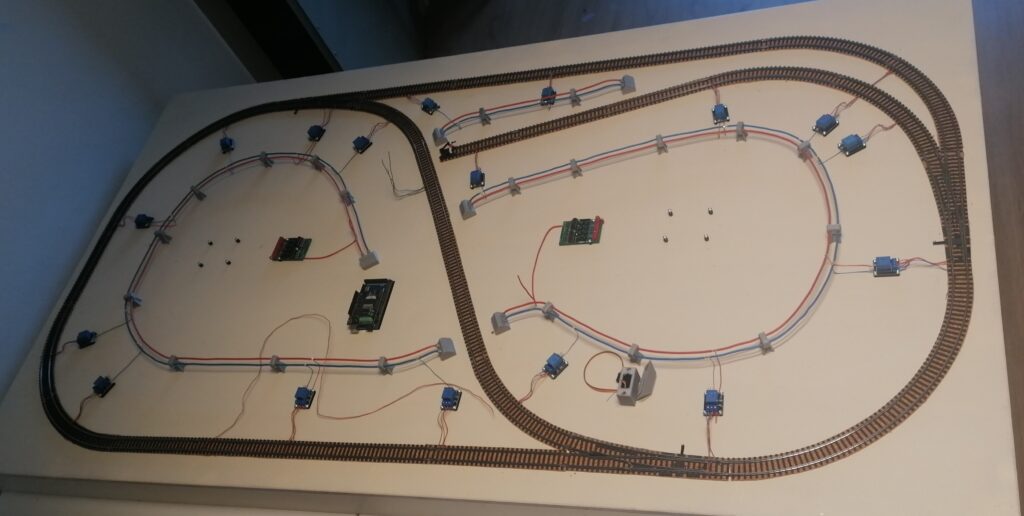
Inmiddels begint ook de testbaan zijn vorm aan te nemen. Er is al begonnen met het neerleggen van de rails. Soms moet er hard worden nagedacht over bepaalde dingen zoals op de foto’s goed is te zien.



Het testbaantje is ietsje aangepast ten opzichte van het eerste ontwerp en er zullen ook sensoren worden toegevoegd zodat er snelheden gemeten kunnen gaan worden en daarmee kunnen dus ook de locs gecalibreerd gaan worden. Op een mini display zullen de meetgegevens worden getoond.
Klik hier voor de volgende update…
Datum: 07-11-2021
Om 2-rail en 3-rail materieel op hetzelfde spoor te kunnen laten rijden, is het noodzakelijk om een goede keuze te maken qua spoor. Er zijn een beperkt aantal mogelijkheden maar de meest voor de hand liggende, is gebruik maken van Märklin K-rail.
Een systeem zoals Dinamo geeft de mogelijkheid om analoog en digitaal op de baan door elkaar te kunnen rijden. Het systeem wordt dan aangestuurd door een programma zoals Koploper of Rocrail waarin de treinen als digitaal of analoog herkenbaar zijn. Op een baanvak waar een trein op moet gaan rijden, wordt dan de juiste voedingsspanning geplaatst. Voor een analoge trein, een analoge spanning en voor een digitale trein, de digitale voedingsspanning. Op basis van dit principe willen we de baan ook via baanvakken gaan aansturen. Veel 3-rail materieel verstaat ook DCC als digitale aansturing. Alleen de oudere 3-rail loc’s moeten specifiek met een Märklin protocol aangestuurd worden. Hier zit nog een keuze of we qua protocol ons kunnen beperken tot DCC. Dat zou kunnen betekenen dat een loc met een oude decoder, een nieuwere multiprotocol decoder moet krijgen. Met DCC als aansturing, is het gemengd rijden wel nog eenvoudiger. De digitale spanning komt dan uit één bron en afhankelijk van het materieel moet deze worden aangeboden op beide spoorstaven (2 rail) of tussen de spoorstaven en de middenrail (3 rail).
Onderstaande linkjes geven wat informatie van andere enthousiastelingen die dezelfde uitdaging zijn aangegaan. Vaak zijn dat banen die of 2-rail of 3-rail kunnen bieden maar niet tegelijk.
https://forum.3rail.nl/index.php?topic=73660.0
Aanpassen van K-rail wissels: https://forum.3rail.nl/index.php?topic=38338.0
Zelfs met Märklin C-rail schijnt het mogelijk te zijn: https://forum.beneluxspoor.net/index.php?topic=75716.0
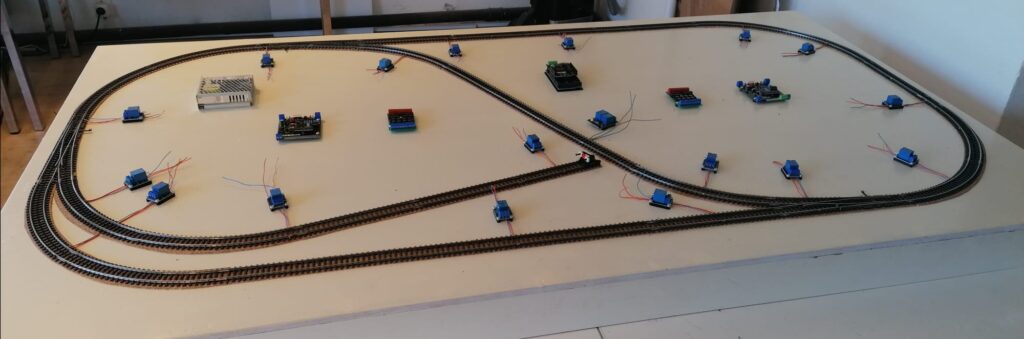
Er is een testbaantje ontworpen om tijdens dit project te gaan testen. Het baantje bevat 5 baanvakken en een keerlus om de techniek die daarvoor nodig is, te kunnen testen.
Uiteraard is het ook nodig om wat ‘intelligentie’ toe te passen. De baanvakken en wissels moeten afhankelijk van de trein die gaat komen, de spanning op een bepaalde manier aangeboden krijgen. Ook als er sprake is van handbediening middels een digitale regelaar, zal een onderliggend systeem deze taak moeten verzorgen. Een pakket zoals Koploper of Rocrail kan dit verzorgen. Een handregelaar zal dan als secundaire bron z’n commando’s via de gekozen software de baan op moeten sturen. Vooralsnog lijkt Rocrail hier een goede optie te zijn. Koploper is wellicht ook een optie maar wordt niet meer onderhouden. Andere pakketten zoals iTrain of JMRI behoren ook nog tot de mogelijkheden. Afhankelijk van de aanwezige expertise, zal ook een keuze qua software gemaakt moeten gaan worden. Vermoedelijk zal in alle gevallen scripts ontwikkeld moeten worden omdat het schakelen van baanvakken op basis van een categorie trein (2-rail danwel 3-rail) geen standaard aanwezige functie is. Ook dit zal in het project onderzocht gaan worden.
Klik hier voor de volgende update…
Klik hier om naar het begin te gaan…